Die Entwicklung autonomer Fahrsysteme zählt zu den spannendsten und zugleich herausforderndsten Feldern moderner Technologie. Traditionelle Ansätze, die auf fest definierten Regeln und handgefertigten Algorithmen beruhen, stoßen in ihrer Skalierbarkeit und Anpassungsfähigkeit schnell an ihre Grenzen. Deshalb gewinnt das Lernen aus Erfahrung, ähnlich wie es Menschen tun, zunehmend an Bedeutung. Ein bahnbrechender Schritt in diese Richtung ist der Einsatz sogenannter World Models – datengetriebener Simulatoren, die eine realistische und flexible Trainingsumgebung für autonome Fahrpolicies schaffen. Im Kern versteht man unter einem World Model ein generatives Modell, das den Zustand der Welt anhand vergangener Zustände und Aktionen vorhersagen kann.
Anders als klassische Simulatoren, die auf starren physikalischen oder regelbasierten Modellen aufsetzen, arbeiten World Models mit latenten Zustandsrepräsentationen. Diese komprimieren die Vielzahl an Informationen eines realen Szenarios in eine handhabbare und berechenbare Form. Darauf aufbauend modellieren sie die Dynamik dieser latenten Zustände, um zukünftige Szenarien vorherzusagen und so ein tiefgehendes Verständnis der Umwelt zu erlangen. Ein entscheidendes Merkmal dieser World Models ist ihre Fähigkeit, durch sogenannte Future Anchoring-Techniken an einen bestimmten zukünftigen Zustand zu koppeln. Das bedeutet, dass der Simulator nicht nur vergangene Informationen verwendet, sondern auch eine Zielposition oder einen Zielzustand kennt, an dem er sich ausrichten kann.
Diese zukunftsorientierte Verankerung ermöglicht es dem Modell, Fehler zu korrigieren und realistischere Simulationen zu erzeugen. So lassen sich beispielsweise komplexe Verkehrssituationen wie Spurwechsel, Stops an Ampeln oder das Abbiegen in Kreuzungen zuverlässig abbilden. Die Bedeutung der Simulation für das Training autonomer Fahrsysteme kann nicht hoch genug eingeschätzt werden. Das Fahren im echten Straßenverkehr birgt immense Risiken, die für experimentelle Trainingsmethoden kaum tragbar sind. Simulationen bieten die Möglichkeit, Szenarien sicher und kontrolliert zu durchlaufen, Fehler zu analysieren und Strategien zu optimieren.
Insbesondere das sogenannte On-Policy Learning profitiert enorm von simulierten Umgebungen: Hierbei lernt das System aus den Konsequenzen seiner eigenen Handlungen, was im realen Straßenverkehr nur eingeschränkt möglich ist. Neben den World Models existiert noch ein weiterer Simulatortyp, der sogenannte reprojektive Simulator. Diese Modelle basieren auf der Tiefenwahrnehmung (Depth Reprojection) und erzeugen neue Ansichten basierend auf der perspektivischen Verschiebung von 3D-Punkten. Obwohl reprojektive Simulatoren in bestimmten Bereichen bereits erfolgreich eingesetzt werden, stoßen sie durch ihre Annahme statischer Szenarien und einiges anderen Einschränkungen schnell an technische Grenzen. Probleme wie ungenaue Tiefenschätzungen, Artefakte bei der Rekonstruktion sowie Schwierigkeiten bei der realistischen Darstellung von Licht und Reflexionen schränken ihren Einsatz vor allem in dynamischen Verkehrsbedingungen ein.
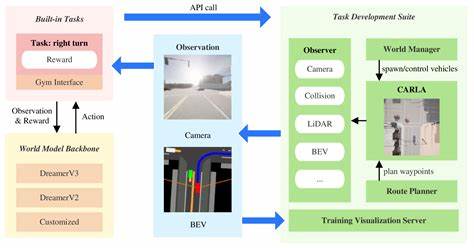
Hier zeigen World Models ihre Stärken. Als vollständig datengetriebene und generative Modelle passen sie sich flexibel an verschiedenste Fahrsituationen an. Sie skalieren mit steigender Rechenleistung und profitieren von tiefgreifenden neuronalen Netzarchitekturen, insbesondere solchen, die auf Diffusionsmodellen und Transformer-Strukturen basieren. Die fortschrittliche Bildkompression mittels VAE (Variational AutoEncoders) oder VQ-VAE, kombiniert mit zeitlichen Vorhersagemodellen wie Video Diffusion Transformers, erlaubt es, nicht nur einzelne Bilder vorherzusagen, sondern ganze Bildersequenzen – also Fahrzeugszenarios über längere Zeiträume realistisch zu simulieren. Ein weiterer wichtiger Aspekt bei der Anwendung von World Models ist die Integration eines Plan Heads.
Dieser Teil des Modells prognostiziert idealerweise die nächsten Fahrentscheidungen, wie Beschleunigung oder Lenkbewegungen. Dadurch kann das Fahrsystem unmittelbar aus der Simulation heraus trainiert werden, indem es kontinuierlich seine Handlungen auf Basis vorhergesehener Zustände optimiert. Diese Kopplung von Wahrnehmung und Handlungsschätzung stellt sicher, dass das Training ein kontinuierliches, realistisches Feedback erhält und die Fahrlinie stetig verbessert wird. Die Praxistauglichkeit dieses Ansatzes konnte bereits in realen Fahrsystemen unter Beweis gestellt werden. So wird beispielsweise ein auf World Models basierendes Trainingsverfahren im Openpilot-System eingesetzt, einer Open-Source-Software für teilautonomes Fahren.
Die Kombination aus simulierten Trainingsdaten und realer Fahrzeugumgebung ermöglicht eine robuste und sichere Entwicklung autonomer Features. Dies zeigt deutlich, dass datengestützte Generative Modelle das Potenzial besitzen, traditionelle Methoden zu ergänzen und langfristig zu verdrängen. Das Lernen in und von simulierten Welten ist eng mit den Grundideen der modernen künstlichen Intelligenz verwandt. Das sogenannte „Shortcut Learning“ – das heißt, wenn Systeme ungewollt gewisse Abkürzungen oder Artefakte ausnutzen – kann in einigen Simulatoren problematisch sein und zu schlechten Generalisierungen führen. Durch die präzise Steuerung und Ankerung in World Models wird dieses Problem minimiert, was zu ehrlicheren Lernprozessen führt.
Zudem fördern diese Modelle die Fähigkeit, aus Fehlern zu lernen, sich anzupassen und komplexe Umweltbedingungen zu bewältigen – Eigenschaften, die für autonomes Fahren von entscheidender Bedeutung sind. Zukunftsweisende Forschung baut zudem auf verteilte und asynchrone Trainingsarchitekturen wie IMPALA oder GORILA auf. Diese ermöglichen es, große Mengen von Simulationsdaten in Echtzeit zu sammeln und parallel die Policy zu verbessern. Die Kombination aus datenintensiven World Models und skalierbaren Trainingsframeworks ebnet so den Weg für autonome Systeme, die kontinuierlich lernen und sich an neue Herausforderungen anpassen. Insgesamt stellt die Integration von World Models in das autonome Fahren einen Paradigmenwechsel dar.
Die Abkehr von klassischen, regelbasierten Systemen hin zu flexiblen, datengetriebenen, generativen Simulatoren bringt den Traum eines wirklich autonomen Fahrzeugs greifbar nahe. Neben technologischen Fortschritten bringt dieser Ansatz auch ethische und praktische Vorteile, indem er Sicherheitsrisiken reduziert und Entwicklungskosten senkt. Die Kombination von State-of-the-Art-Machine-Learning-Techniken mit fundiertem Simulationsdesign sowie die Verbindung realer Fahrdatensätze und innovativer Trainingsmethoden machen die World Models zu einer Schlüsseltechnologie der nächsten Generation autonomer Fahrzeuge. Unternehmen wie comma.ai sind Vorreiter in diesem Bereich und zeigen mit ihren Publikationen und Open-Source-Projekten, wie praxisnah und leistungsfähig solche Systeme bereits heute sind.