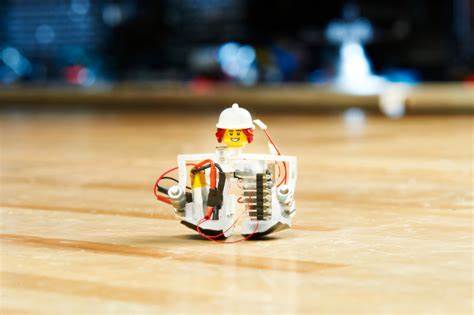
Die Welt der Robotik erlebt eine spannende Revolution: Miniaturroboter gewinnen zunehmend an Bedeutung und eröffnen völlig neue Perspektiven für viele Anwendungsbereiche. Einer der herausragendsten Akteure in diesem Feld ist „Zippy“, ein zweibeiniger Roboter, der von Forschern der Carnegie Mellon University entwickelt wurde und mit nur 1,5 Zoll (ca. 3,8 cm) Körpergröße als der kleinste, schnellste und energieautark arbeitende zweibeinige Roboter gilt. Das Projekt hinter Zippy stellt einen bedeutenden Fortschritt in der Miniaturisierung und Leistungsfähigkeit mobiler Roboter dar und könnte die Zukunft der Robotikanwendungen nachhaltig prägen. Die Entwicklung des Roboters wurde vom National Science Foundation (NSF) unterstützt und unter der Leitung der Professoren Aaron Johnson und Sarah Bergbreiter an der Carnegie Mellon University realisiert.
Ziel war es, ein tieferes Verständnis für das Laufen bei sehr kleinen Robotern zu erlangen und so die Möglichkeiten für praktische Anwendungen zu erweitern. Zippy sticht durch seine geringe Größe und beeindruckende Geschwindigkeit hervor. Verglichen mit seiner Körperlänge kann der Roboter mit unglaublichen zehn Beinlängen pro Sekunde laufen. Dies entspricht der Geschwindigkeit eines durchschnittlichen Erwachsenen, der mit knapp 30 km/h unterwegs ist – eine Leistung, die in der Robotik dieser Größenordnung bisher unerreicht war. Trotz dieser erstaunlichen Geschwindigkeit arbeitet Zippy völlig autonom, das heißt, er benötigt keine externe Energiequelle, da Akku, Aktuator und das Steuersystem vollständig in seinem winzigen Gehäuse integriert sind.
Die zweibeinige Fortbewegung stellt für Roboter eine besondere Herausforderung dar, da sie eine Balance zwischen der Stabilität und der Mobilität verlangen. Im Gegensatz zu Robotern mit Rädern haben zweibeinige Roboter einen enormen Vorteil, wenn es darum geht, unebene, enge oder komplexe Umgebungen zu durchqueren, die für andere Robotertypen unzugänglich sind. Gerade in Bereichen wie Notfallrettung, industrieller Inspektion oder sogar wissenschaftlichen Expeditionen in geologisch schwierigen Regionen könnten sich die Fähigkeiten von Zippy als richtungsweisend erweisen. Der Bewegungsmechanismus von Zippy basiert auf einer einfachen, aber effektiven Methode. Der Roboter hebt sein vorderes Bein an und verlagert dabei den Schwerpunkt nach vorne.
Durch die abgerundete Form des Vorderfußes entsteht genügend Raum für das hintere Bein, um durchzuschwingen und einen vollständigen Schritt zu vollführen. Insbesondere bei der Miniaturisierung ist diese Technik effizient, da mechanische Komponenten wie ein Gelenkanschlag als feste Begrenzung am Hüftgelenk verwendet werden, was die Notwendigkeit komplexer und schwerer Servos überflüssig macht. Die leichte Konstruktion trägt maßgeblich dazu bei, die hohe Beweglichkeit und Geschwindigkeit zu erreichen. Hinter der Entwicklung von Zippy stehen talentierte junge Wissenschaftler und Studenten, darunter Soma Narita und Josef Macera, die auf Basis eines früheren Prototyps namens „Mugatu“ mit runden Füßen und nur einem Antrieb im Hüftbereich die Designprinzipien optimierten. Diese iterative Weiterentwicklung ermöglichte die Schaffung eines Robotermodells, das sowohl robust als auch hochfunktional ist.
Der Erfolg von Zippy ist somit auch ein hervorragendes Beispiel für exzellente Forschungsarbeit in interdisziplinären Teams, die ingenieurwissenschaftliche, informatische und robotische Kompetenzen bündelt. Die Forschenden am Robotics Institute der Carnegie Mellon University, darunter auch der Doktorand Steven Man, sehen in Zippy ein enormes Potenzial für vielfältige Einsatzzwecke. Das außergewöhnliche Maß an Geschicklichkeit und Agilität erlaubt es Robotern dieser Art, an Orte vorzudringen, die bisher unzugänglich waren – sei es innerhalb verwinkelter Trümmer nahe Unglücksorten, in verwinkelten Industrieanlagen oder in unwegsamem Gelände. Die autonomen Fähigkeiten von Zippy könnten so beispielsweise eine entscheidende Rolle in Such- und Rettungsmissionen spielen, indem sie rasch Bereiche erkunden und Gefahrenherde aufspüren. Darüber hinaus könnten mehrere dieser Roboter als koordinierte Schwärme gleichzeitig agieren, um Daten umfassend und effizient zu sammeln.
Was die zukünftige Entwicklung betrifft, so planen die Forscher darüber hinaus, Zippy mit zusätzlichen Sensoren auszustatten, etwa Kameras und weitere Lokalisierungstechnologien. Die Integration solcher Sensoren soll es den Minirobotern ermöglichen, ihre Umwelt besser zu erfassen und ihre Bewegungen autonom zu steuern. Eine solche Weiterentwicklung eröffnet perspektivisch den Weg für vernetzte Roboterschwärme, die gemeinsam komplexe Aufgaben in schwer zugänglichen Gebieten übernehmen können. Zippy repräsentiert außerdem eine wichtige Forschungsgrundlage für das Verständnis von Laufmechanismen auf kleinstem Raum. Die Herausforderung, wie man komplexe Bewegungsabläufe auf minimalistischer Hardware und mit begrenztem Energiehaushalt realisiert, wird durch diesen Roboter überwunden.
Dies ist für die gesamte Robotik von großer Bedeutung, da viele reale Anwendungen eine hohe Mobilität bei geringem Platzbedarf und minimaler Energiemenge erfordern. Die Entwicklung des kleinsten, schnellsten und energieautarken zweibeinigen Roboters dokumentiert eindrucksvoll, wie Technik und Innovation zusammenfinden, um die Grenzen des Möglichen immer weiter zu verschieben. Mit Zippy ist es gelungen, einen hochfunktionalen Roboter zu bauen, der in der Roboterlandschaft neue Maßstäbe setzt – und das bei den wichtigsten Eigenschaften Mobilität, Geschwindigkeit und Selbstständigkeit. Diese Erfolge spiegeln nicht nur das technische Können des Teams wider, sondern liefern auch Inspiration für die Zukunft der Miniaturrobotik. Insgesamt bietet Zippy spannende Einblicke in die Richtung, in die sich die Robotik entwickelt – noch kleinere, intelligentere und autonomere Maschinen, die in vielfältigsten Situationen agieren können.
Dabei zeigt sich, wie wichtig interdisziplinäre Zusammenarbeit und fortgeschrittene Technik sind, um fundamentale Hürden zu überwinden. Die möglichen Anwendungsgebiete sind breit gefächert: Von Such- und Rettungseinsätzen über Umweltbeobachtung bis zur automatisierten Inspektion industrieller Anlagen. Gerade die Kombination aus kleinster Größe, hoher Geschwindigkeit und Autonomie macht Zippy zu einem Meilenstein der modernen Robotik, der die Zukunft der mobilen Roboter entscheidend beeinflussen wird.