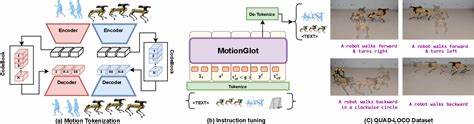
Die Weiterentwicklung von Bewegungsgenerierungstechnologien ist ein Schlüsselfaktor für den Fortschritt in Robotik, Animation und Mensch-Maschine-Interaktion. In dieser Hinsicht stellt MotionGlot einen bedeutenden Fortschritt dar, da es als ein einziges Modell konzipiert wurde, um Bewegungen über verschiedene Körpergestalten hinweg zu erzeugen – von vierbeinigen Robotern bis hin zu menschlichen Figuren mit unterschiedlichen Bewegungsdimensionen. Die technische Innovation von MotionGlot basiert auf der Übertragung bewährter Trainingsverfahren aus der Welt großer Sprachmodelle (Large Language Models, LLMs) auf den Bereich der Bewegungsdatenverarbeitung, was neue Trends und Potenziale in der Bewegungs- und Robotikforschung einläutet. MotionGlot wurde entwickelt, um die Herausforderung der Bewegungsgenerierung nicht nur für einem einzigen Embodiment (körperlichen Erscheinungsbild), sondern für unterschiedliche Körperformen mit variierenden Freiheitsgraden zu meistern. Dies ist besonders relevant, da unterschiedliche Roboter und animierte Charaktere verschiedene Kinematiken und Aktionsräume nutzen.
Während beispielsweise quadrupedale Roboter eine ganz andere Bewegungsdynamik und Kontrollstruktur aufweisen als humanoide Systeme, versucht MotionGlot durch eine gemeinsame Modellarchitektur, die Bewegungen beider Extremtypen zu erfassen und zu erzeugen. Das Herzstück der Innovation bei MotionGlot besteht darin, dass es die Trainingsprinzipien großer Sprachmodelle adaptiert, insbesondere das Instruction-Tuning. Dieses Verfahren ermöglicht es, ein Modell auf diverse Aufgaben mit sprachlich formulierbaren Eingaben und Ausgaben zu trainieren. MotionGlot verwendet eine speziell angepasste Instruction-Tuning-Vorlage, um verschiedenartige Bewegungsaufgaben als instruktionsbasierte Probleme zu formulieren. Diese Methode hebt sich von bisherigen Ansätzen ab, die oft auf isolierte Modelle mit starrer Aufgabe oder eingeschränktem Anwendungsbereich setzten.
Um die Leistungsfähigkeit und Vielseitigkeit von MotionGlot zu demonstrieren, wurden sechs unterschiedliche Aufgaben definiert und untersucht. Die Ergebnisse zeigen eine durchschnittliche Leistungsverbesserung von über 35 Prozent verglichen mit vorherigen Methoden. Diese Steigerung verdeutlicht nicht nur die Effektivität des Modells, sondern auch das Potenzial, KI-basierte Bewegungsgenerierung in der Praxis weiter zu verbessern und vielfältiger einzusetzen. Ein weiterer bedeutender Beitrag der MotionGlot-Entwickler liegt in der Bereitstellung neuartiger Datensätze, die das Training und die Validierung der Bewegungsmodelle unterstützen. So wurde ein umfangreicher Datensatz mit über 48.
000 Trajektorien quadrupedaler Expertendynamik erstellt, welche mit richtungsbasierten Textannotationen versehen sind. Parallel dazu entstand ein Datensatz mit mehr als 23.000 situativen Textprompts für die menschliche Bewegungsgeneration. Diese Kombination aus multimodalen Daten bietet eine solide Basis für Training und Evaluation, die sowohl physische Bewegung als auch natürlichsprachliche Beschreibungen integriert. Die Entwicklung von MotionGlot zeigt auch praxisnahe Anwendungsfelder im Bereich der Robotik auf.
Durch Hardwareexperimente konnte gezeigt werden, dass das Modell nicht nur theoretisch leistungsfähig ist, sondern sich auch in realen Systemen tatsächlich einsetzen lässt. Dies schafft eine Brücke zwischen Forschung und praktischer Anwendung und ist besonders wichtig für Bereiche wie autonome Robotik, interaktive Animationen oder assistive Technologien. Die technische Umsetzung von MotionGlot nutzt tiefgreifende neuronale Netzwerke, welche eine komplexe Repräsentation von Bewegungen und Embodiments erlernen. Durch das Training auf mehreren verschiedenen Körperformen können relevante Bewegungsmuster generalisiert und flexibel an neue Aufgaben angepasst werden. Dies führt zu einer bislang unerreichten Robustheit und Anpassungsfähigkeit bei der Bewegungserzeugung über heterogene Systeme.
Die Kombination aus KI-basiertem Instruction-Tuning, umfangreichen multimodalen Datensets und der Unterstützung verschiedener körperlicher Strukturen eröffnet neue Wege, Bewegungen automatisiert und dennoch natürlich wirken zu lassen. Besonders im Bereich der humanoiden Robotik und Animation kann MotionGlot die Erstellung realistischer Bewegungsabläufe vereinfachen und beschleunigen. Gleichzeitig bietet es auch Potenzial für weniger erforschte Gebiete wie tierähnliche Robotersysteme, die komplexe Lauf- und Manöverfähigkeiten erfordern. Ein weiterer wichtiger Aspekt von MotionGlot ist die Verwendung natürlicher Sprache als Schnittstelle zwischen Mensch und Maschine. Indem Bewegungsaufgaben in Form von Textanweisungen beschrieben werden können, wird die Bedienung und Steuerung von Robotern und Animationen erheblich intuitiver und flexibler.
Dies entspricht dem Trend hin zu immer benutzerfreundlicheren Systemen, die auch ohne tiefgehende technische Kenntnisse komplexe Befehle interpretieren und ausführen können. Neben der unmittelbaren Praxisrelevanz wirft MotionGlot auch interessante wissenschaftliche Fragen auf. Zum Beispiel zeigt die erfolgreiche Übertragung von Trainingskonzepten aus großen Sprachmodellen in den Bereich der Bewegungsdatenverarbeitung, wie interdisziplinär maschinelles Lernen heute angewandt werden kann. Solche Ansätze fördern die Konvergenz zwischen Bereichen wie Robotik, NLP und Computer Vision. Zudem motivieren sie die Erforschung universeller Modelle, die unterschiedliche Datenmodalitäten und Aufgaben vereinen.
In Zukunft ist zu erwarten, dass Ansätze wie MotionGlot weiter verfeinert und erweitert werden. Möglichkeiten ergeben sich etwa durch die Integration zusätzlicher sensory Daten zur Verbesserung der Bewegungskontrolle, durch das Hinzufügen mehrerer Embodiments mit noch komplexeren Freiheitsgraden oder durch eine intensivere Nutzung multimodaler Kommunikation mit natürlichen Spracheingaben. Auch das Zusammenspiel mit physikalisch-basierten Simulationsmodellen kann die Qualität und Realitätsnähe der erzeugten Bewegungen weiter steigern. Die Erfolge von MotionGlot bieten zudem eine Grundlage für neue Anwendungen in verschiedensten Branchen. In der Unterhaltungsindustrie können realistischere und adaptivere Charakteranimationen entstehen.
Im Bereich der Robotik wiederum lassen sich flexiblere, anpassungsfähigere Systeme entwickeln, die sich besser in dynamische Umgebungen einfügen. Darüber hinaus können auch Therapie- und Rehabilitationsanwendungen von verbesserten Bewegungsmodellen profitieren, beispielsweise durch personalisierte Bewegungsprogramme oder assistive Robotik. Zusammenfassend markiert MotionGlot eine bedeutende Weiterentwicklung in der automatisierten Bewegungsgenerierung, da es auf innovative Weise verschiedene Embodiments und Aufgaben in einem einzigen Modell vereint. Durch die Kombination bewährter Methoden aus dem Bereich großer Sprachmodelle mit neuartigen Bewegungsdatensätzen entstehen leistungsfähige und vielseitige Systeme. Diese können sowohl für Forschung als auch für die praktische Anwendbarkeit in Robotik und Animation vielversprechende Resultate liefern.
Die Zukunft der multimodalen, mehrkörperigen Bewegungssynthese dürfte durch Modelle wie MotionGlot wesentlich mitgeprägt werden.