Die Robotik erlebt einen bemerkenswerten Fortschritt: Wissenschaftler des Georgia Institute of Technology haben einen bahnbrechenden Soft-Roboter entwickelt, der ohne Beine eine beeindruckende Sprunghöhe von zehn Fuß (ca. drei Meter) erreicht. Inspiriert wurde dieser Roboter durch das Verhalten winziger parasitischer Fadenwürmer, sogenannte Nematoden, die trotz ihrer winzigen Größe erstaunliche Sprungfähigkeiten aufweisen. Die Erkenntnisse der Forscher, veröffentlicht in Science Robotics, haben das Potenzial, die Entwicklung von Robotern grundlegend zu verändern – besonders für Anwendungen in unwegsamem Gelände und bei Rettungseinsätzen.Nematoden sind winzige Wesen, deren Körper dünner als ein menschliches Haar sind.
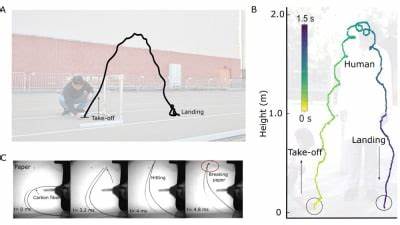
Sie besitzen keine Beine, können aber bis zu zwanzigmal ihre Körperlänge springen – eine äquivalente Leistung bedeutet, dass ein Mensch ausliegend auf dem Boden plötzlich auf ein dreistöckiges Gebäude springen könnte. Diese Fähigkeit haben die Forscher als Ausgangspunkt genommen, um ein roboterähnliches Gerät zu entwickeln, das das Prinzip der Energie-Speicherung durch Körperverformung nachahmt.Das Geheimnis der Nematoden liegt darin, dass sie ihren Körper zu einem Knoten oder einer sogenannten „Kink“-Struktur formen, die gespeicherte Energie enthält. Diese Energie wird in einem extrem kurzen Bruchteil einer Millisekunde freigesetzt, was zu einem Rückwärts- oder Vorwärtssprung führt. Dabei verändern sie geschickt ihren Körperschwerpunkt, um die Richtung des Sprungs zu bestimmen – eine Fähigkeit, die in der Tierwelt einzigartig ist, vor allem auf so kleiner Skala.
Der entwickelte Soft-Roboter besteht aus einem fünf Zoll langen Silikonstab, der mit einem kohlefaserverstärkten Kern durchzogen ist. Diese Kombination erlaubt es dem Roboter, die Formveränderungen der Nematoden präzise zu imitieren und die gespeicherte elastische Energie freizusetzen, um einen Sprung von bis zu drei Metern zu erreichen. Das Besondere: Trotz des Fehlens von Beinen nutzt der Roboter die Verformung seines Körpers als Antriebssystem.Das Innovationspotenzial dieser Forschung ist enorm. Durch das Studium der Energie-Speicherung und des schnellen Energie-Einsatzes in biologischen Systemen können Ingenieure neue Roboterdesigns entwickeln, die in vielfältigen Umgebungen funktionieren.
Zum Beispiel könnten solche Roboter über unebenes Gelände springen, Hindernisse überwinden oder sich in engen Räumen bewegen, wo herkömmliche Räder oder Beine versagen würden. Dies ist besonders relevant für zukünftige Such- und Rettungsmissionen oder wissenschaftliche Erkundungen in schwer zugänglichen Gebieten.Die Forschungsgruppe um Sunny Kumar und Ishant Tiwari im Labor von Professor Saad Bhamla hat durch das Verbinden von Biologie und Ingenieurwesen eine neue Art von Robotik geschaffen, die nicht nur effektiv, sondern auch kostengünstig und robust ist. Die Zusammenarbeit mit anderen Universitäten, darunter der Universität von Kalifornien (Berkeley und Riverside), verdeutlicht die Interdisziplinarität dieses Projekts.Neben den direkten Anwendungen für die Robotik zeigt die Studie auch, wie wertvoll das Verständnis kleiner Lebensformen für technische Innovationen ist.
Die Fähigkeit von Nematoden, Energie durch Körperkink zu speichern und freizusetzen, könnte in zukünftigen Technologien weit über Robotik hinaus Anwendung finden – sei es in der Medizin, Materialwissenschaft oder sogar in der Raumfahrt, wo ein leichter und energieeffizienter Antrieb entscheidend ist.Die Effizienz und Wiederholbarkeit der Sprungtechnologie sind beeindruckend. Der Roboter kann seine Bewegung in sehr kurzen Zeitintervallen wiederholen, was ihn äußerst agil macht. Dies öffnet Tür und Tor für eine neue Generation von Maschinen, die sich an wechselnde Umweltbedingungen anpassen können. Durch die Kombination aus Flexibilität, Schnelligkeit und Anpassungsfähigkeit könnten diese Roboter bald in vielen Bereichen menschliche Arbeit unterstützen oder sogar ersetzen.
Ein weiterer spannender Aspekt ist die Verwendung von Kohlefaser als Verstärkung im Silikonkörper des Roboters. Kohlefaser hat eine hohe Zugfestigkeit und geringe Masse, was optimal ist, um die Kink-Struktur aufrechtzuerhalten und Energie effizient zu speichern. Die Materialwahl zeigt, wie wichtig moderne Werkstoffe für zukunftsweisende Robotersysteme sind.Die Forscher betonen, dass dieses Projekt nur der Anfang ist. Zukünftige Entwicklungen sollen es ermöglichen, Roboter zu entwerfen, die nicht nur hoch springen, sondern auch komplexere Bewegungen ausführen und in verschiedenen Umgebungen navigieren können.
Konzepte wie das gezielte Verändern des Körperschwerpunkts könnten erweitert werden, um präzises Manövrieren in drei Dimensionen zu gewährleisten.Abschließend zeigt der Erfolg dieses Soft-Roboters, wie Naturphänomene und die Beobachtung natürlicher Bewegungsabläufe wertvolle Impulse für die Technik liefern können. Durch das perfekte Zusammenspiel von Biologie, Materialwissenschaft und Robotik könnten bald neue Maschinentypen entstehen, die unsere Arbeits- und Lebenswelt erheblich bereichern. Die Fähigkeit, ohne Beine zu springen und dabei erstaunliche Höhen zu erreichen, ist ein Beweis dafür, dass innovative Denkweisen die Grenzen des technisch Machbaren immer wieder neu definieren.