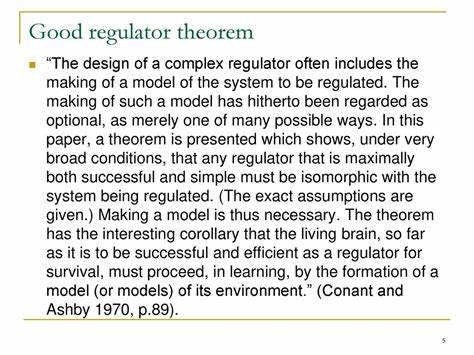
Das Good Regulator Theorem ist eine fundamentale Erkenntnis aus dem Bereich der Regelungstechnik und Cybernetik, die erstmals von Roger C. Conant und W. Ross Ashby formuliert wurde. Es besagt, dass jeder gute Regler eines Systems zwangsläufig ein Modell dieses Systems enthalten oder darauf zugreifen muss. Diese Einsicht hat weitreichende Konsequenzen nicht nur für die technische Steuerung komplexer Prozesse, sondern auch für die Biologie, die Psychologie und die Künstliche Intelligenz.
Im Kern steht die Erkenntnis, dass ein Regler, der ein System effizient und zuverlässig steuern will, dessen Verhalten verstehen oder zumindest in abstrahierter Form abbilden muss. Dieser Ansatz widerspricht moderen Vorstellungen, bei denen Regler durch rein adaptive oder rein datengetriebene Verfahren funktionieren sollen, ohne explizite Modellierung des Systems. Conant und Ashby zeigten allerdings bereits vor mehr als fünfzig Jahren, dass der optimale Regler ein internes Modell besitzen muss, um erfolgreiche Steuerungsleistungen zu gewährleisten. Die Ausgangslage der gesamten Theorie basiert auf dem Umgang mit Unsicherheit, Störungen und der Vielfalt möglicher Systemzustände. Ein Regler soll dabei Eingriffe vornehmen, die das System in einem gewünschten Zustand halten oder zu diesem führen.
Die Autoren definierten dabei fünf wichtige Variablen, die in der Regelung eine Rolle spielen: Störungen (D), Ereignisse im Regler (R), Ereignisse im restlichen System außer dem Regler (S), die Gesamtheit aller möglichen Ereignisse (Z) und jene Ereignisse, die als wünschenswert betrachtet werden (G). Die Herausforderung besteht darin, dass der Regler alle wichtigen Ereignisse S, die außerhalb seines Einflussbereichs liegen, erfassen und berücksichtigen muss, um zielgerecht auf die Störungen D reagieren zu können. Das Good Regulator Theorem bringt diesen Zusammenhang formal auf den Punkt: Die Fähigkeit eines Reglers, gute Ergebnisse zu erzielen – also das System in den Bereich der wünschenswerten Ereignisse G zu bringen – ist daran gebunden, dass eine Abbildung von den Zuständen des Systems zu den Zuständen des Reglers existiert. Das bedeutet, der Regler muss sein Verhalten auf einem Abbild beziehungsweise einem Modell der Steuerstrecke aufbauen. Diese Abbildung beschreibt ein sogenanntes Homomorphismus-Verhältnis, bei dem das Modell einige Informationen über das Originalsystem enthalten, aber nicht zwangsläufig jede Details absolut genau widerspiegeln muss.
Die Herkunft der Aussage beruht auf einer Analyse der Entropie, das heißt der Unbestimmtheit oder des Informationsgehalts der möglichen Ausgangswerte des gesteuerten Systems. Die Entropie ist dann am geringsten – also das Verhalten am vorhersehbarsten und kontrollierbarsten – wenn der Regler die Systemvariationen in einem Modell abbildet. Dadurch kann der Regler gezielte Steuerungsreaktionen ableiten und Störungen effektiv entgegenwirken. Dieser theoretische Rahmen hat auch weitreichende Konsequenzen für die Neurowissenschaften und die Kognitionsforschung. Wenn das menschliche Gehirn als Regler für das Überleben betrachtet wird, liegt der Schluss nahe, dass es seine erfolgreiche Steuerung durch Lernen und Bildung interner Modelle der Umwelt vollzieht.
Indem das Gehirn Simulationen oder Hypothesen über seine Umgebung generiert, kann es Störungen antizipieren und adaptive Verhaltensweisen entwickeln, die das Überleben sichern. Das Good Regulator Theorem ist jedoch nicht nur eine abstrakte Theorie, die sich auf biologische Systeme bezieht. Es hat auch in der technischen Regelungstechnik immense Bedeutung. In moderner Steuerungstechnik ist es von großer Relevanz, dass die Regler eine interne Repräsentation oder zumindest Zugang zu einem Modell der Regelstrecke haben. So wird beispielsweise bei der sogenannten internen Modellregelung explizit ein Modell der zu steuernden Dynamik in den Regler integriert, um Realisierbarkeit und optimale Performance zu gewährleisten.
Im Gegensatz dazu basieren traditionelle klassische Feedback-Regelsysteme oft auf negativen Rückkopplungsmechanismen, die ohne explizites Modell funktionieren. Hier kann der Regler zwar auf Abweichungen reagieren, besitzt aber keine detaillierte Abbildung der Systemdynamik. Das zeigt, dass das Good Regulator Theorem nicht nur ein theoretisches, sondern auch ein praktisches Prinzip ist, das die Grenzen und Möglichkeiten von Steuerungssystemen aufzeigt. Darüber hinaus hat sich das Good Regulator Theorem als eine überaus allgemeine Aussage präsentiert, die nicht nur auf technologische Systeme beschränkt ist. Es lässt sich auf jede Art von regulierenden oder selbstregulierenden Systemen anwenden, sei es biologische Organismen, soziale Systeme oder computerbasierte Algorithmen.
Die Forderung nach einem internen Modell als Voraussetzung für gutes Regelverhalten ist eine universelle Struktur, die über die Disziplinen hinweg greift. Kritiker betonen allerdings, dass das originale Beweiskonstrukt und die Interpretation des Theorems noch weitere Forschung benötigen. Einige Experten argumentieren, dass die ursprüngliche formale Herleitung nicht vollständig belegt, warum jeder gute Regler zwangsweise ein vollständiges Modell braucht oder was genau eine „gute“ Regulierung in allen Kontexten ausmacht. Dennoch bleibt die Aussage des Theorems zentral für fortgeschrittene Regelkonzepte und Systeme, in denen Komplexität und Unsicherheit beherrscht werden müssen. In der Praxis bedeutet das, dass die Entwicklung von Steuerungssystemen oder Reglern ohne Modellverständnis begrenzt ist.
Selbst in Bereichen wie autonomes Fahren, Robotik oder Künstliche Intelligenz wird die Modellbildung immer wichtiger, um Systemverhalten vorhersagbar zu gestalten und auf Störungen wirksam reagieren zu können. Ohne das zugrundeliegende Modell wird die Steuerung im besten Fall suboptimal, im schlimmsten Fall scheitert sie komplett. Eine spannende Verwandtschaft stellt auch das Ethikproblem in der Regelung dar. Das sogenannte ethische Reglerproblem beschäftigt sich mit der Frage, wie Systeme konzipiert werden können, die nicht nur technisch gut regulieren, sondern auch moralisch vertretbare Entscheidungen treffen. Auch hier ist eine Art Modell des Systems und der Umgebung nötig, um ethische Prinzipien und Ziele abzubilden.
Die Konstruktion solcher ethischer Regler gehört heute zu einem wichtigen Forschungsfeld und knüpft unmittelbar an die Grundlagen des Good Regulator Theorems an. Insgesamt zeigt das Good Regulator Theorem, wie eng Regelung mit Erkenntnis und Modellbildung verknüpft ist. Es fordert von jedem leistungsfähigen Regler – ob biologisch oder künstlich –, dass er ein internes Abbild der Systemeigenschaften besitzt, um effektive Kontrolle und Anpassung zu gewährleisten. Dies ist einer der fundamentalen Bausteine für das Verständnis komplexer Systeme und hat entscheidenden Einfluss auf zahlreiche Disziplinen von der Systemwissenschaft bis hin zur praktischen Technologieentwicklung. Mit zunehmender Digitalisierung und wachsender Komplexität der technischen und sozialen Systeme gewinnt die Bedeutung des Good Regulator Theorems weiter an Gewicht.
Nur durch das Verständnis und die Implementierung von Modellen können Systeme so reguliert werden, dass sie Stabilität, Anpassungsfähigkeit und optimales Verhalten zeigen. Die Theorie von Conant und Ashby bleibt somit ein zeitloser Leitgedanke für Wissenschaftler, Ingenieure und Denker, die Systeme aller Art gestalten und steuern möchten.