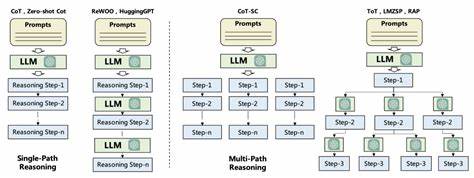
In der modernen Robotik und KI gewinnt die Fähigkeit physischer Agenten, Aufgaben eigenständig zu planen und auszuführen, zunehmend an Bedeutung. Digitale Agenten, die auf großen Sprachmodellen (LLMs) basieren, haben bereits großen Fortschritt in Bereichen wie Tool-Nutzung, Gedächtnismanagement und mehrstufiger Aufgabenplanung gezeigt. Doch eine der spannendsten Herausforderungen besteht darin, diese Fortschritte in die reale, physische Welt zu übertragen. Insbesondere bedeutet das, dass physische Agenten wie Roboter, die mit Sensoren und Aktuatoren ausgestattet sind, effizient miteinander kommunizieren und Informationen austauschen müssen, um komplexe Koordinationsaufgaben zu bewältigen. Ein zentrales Problem ist, wie diese Agenten ihren Weltzustand, ihre Beobachtungen und geplanten Aufgaben teilen, um die Zusammenarbeit zu optimieren.
Vor diesem Hintergrund stehen zwei Ansätze besonders im Fokus: die Nutzung von Retrieval-Augmented Generation (RAG) und gemeinsame Speicherlösungen wie Wissensgraphen oder zentralisierte Datenspeicher. Retrieval-Augmented Generation (RAG) ist ein methodischer Ansatz aus dem Bereich der natürlichen Sprachverarbeitung, bei dem ein Sprachmodell mit externen Informationsquellen kombiniert wird, um relevante Fakten abzurufen und in seine Antworten einzuarbeiten. Übertragen auf physische Agenten ermöglicht RAG, dass Agenten auf umfangreiche Datenbestände zugreifen und daraus kontextbezogene Informationen extrahieren, die sie für ihre Planung oder Entscheidungsfindung benötigen. Der Vorteil von RAG liegt darin, dass der Wissensspeicher nicht zwangsläufig vollständig im Modell selbst verankert sein muss, sondern flexibel externe Daten involviert werden können. Somit lässt sich ein dynamisches, aktualisierbares Gedächtnis schaffen, das mit den sich ändernden Umweltzuständen Schritt halten kann.
Andererseits bietet die Nutzung eines gemeinsamen, strukturierten Speichers, etwa in Form eines Wissensgraphen, eine andere Herangehensweise: Hierbei werden relevante Informationen – zum Beispiel der genaue Standort eines Objekts, die gesamte Umgebungskarte oder der Status von Aufgaben – zentral und explizit gespeichert. Die Agenten greifen auf diesen Speicher zu und können aus der gemeinsam gelebten Realität konsistente, einheitliche Daten entnehmen. Das eröffnet Vorteile hinsichtlich Nachvollziehbarkeit, klarer Datenstrukturen und der Möglichkeit, komplexe Abhängigkeiten sowie Hierarchien zwischen Aufgaben sichtbar zu machen. Allerdings erfordert dieser Ansatz eine durchdachte Architektur, die Konflikte im Mehragentenbetrieb vermeidet und sowohl Latenz als auch Speicherung großer Datenmengen effizient managt. Ein praktisches Beispiel verdeutlicht die Konzepte: Wenn Roboter A einen Gegenstand in Zone Z entdeckt und Roboter B diesen später abrufen soll, müssen sie über den Zustand der Welt und die Position des Objekts im Wesentlichen synchronisiert sein.
Wird RAG verwendet, könnte Roboter B beim Zugriff auf eine zentrale, dynamisch aktualisierte Datenbasis mittels Suchanfragen die relevante Information „Gegenstand in Zone Z“ abrufen. Komplementär dazu könnte ein gemeinsam genutzter Wissensgraph unmittelbar den Informationsstatus liefern, der mit Hilfe von Abfrageoperationen (Queries) abgerufen und für die Aufgabenplanung verwendet wird. In der Praxis zeigt sich, dass viele Entwickler und Forscher aktuell hybride Lösungen erproben, die die Stärken beider Systeme nutzen. Einige kombinieren strukturierte Daten in einem Wissensgraphen mit unstrukturierten Datenquellen, auf die RAG-Lösungen zugreifen können. Die Kombination ermöglicht sowohl die Integration vielfältiger Informationsquellen als auch die strukturelle Zuordnung und Planbarkeit von Aufgaben unter den Agenten.
Interessanterweise entstehen auch alternative Ansätze, welche die Koordination über sogenannte typed task graphs realisieren. Hierbei wird der Fokus von der expliziten Speicherung des Weltzustands hin zur Aufgabenabfolge und deren Verknüpfungen verlagert, wodurch die Abstimmung zwischen Agenten als eine Art Prozesslinie verstanden wird. Diese Methode kann hinsichtlich Skalierbarkeit Vorteile bringen, da sie weniger auf globale Statusinformationen und mehr auf den Aufgabenfluss baut. Dennoch sind hier weitere Untersuchungen notwendig, um die allgemeine Anwendbarkeit in Umgebungen mit hoher Komplexität zu evaluieren. Die Wahl zwischen RAG, gemeinsamen Speichern oder alternativen Methoden hängt stark von den jeweiligen Anforderungen seiner Anwendung ab.
Faktoren wie Geschwindigkeit der Informationsaktualisierung, Skalierbarkeit der Systeme, Arten der zu verarbeitenden Daten (strukturiert versus unstrukturiert), Robustheit gegenüber Ausfällen und die Komplexität der Kooperationsaufgaben spielen entscheidende Rollen. Insgesamt lässt sich feststellen, dass die Forschung in diesem Bereich noch in einem frühen Stadium steckt, aber großes Potenzial besitzt. Die Integration von LLM-basierten Agenten in physische Systeme eröffnet neue Dimensionen in Sachen Autonomie und Flexibilität. Zukünftige Systeme werden vermutlich verstärkt auf hybride Gedächtnisarchitekturen setzen, die mithilfe von RAG sowohl eine flexible externe Informationsanreicherung als auch die Vorteile strukturierter Wissensrepräsentation vereinen. Für Entwickler, die sich mit der Aufgabenplanung in robotischen Teams beschäftigen, ist es wichtig, unterschiedliche Ansätze zu kennen und abzuwägen.
Eine offene Kommunikation zwischen den Agenten, effiziente Speicherkonzepte und eine durchdachte Architektur sind essenziell, um eine reibungslose Koordination zu gewährleisten. Die kreative Kombination verschiedener Lern- und Speicherstrategien wird Innovationen in der Koordination mehrerer physischer Agenten beflügeln und letztlich die praktische Umsetzung komplexer Multi-Roboterszenarien im Alltag voranbringen.