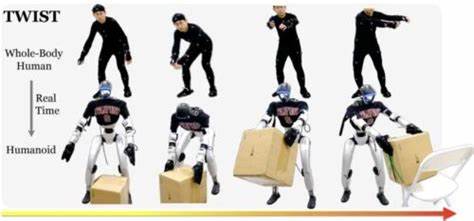
Die Robotik hat in den letzten Jahrzehnten enorme Fortschritte gemacht, doch die intuitive und koordinierte Steuerung humanoider Roboter bleibt eine große Herausforderung. Gerade die Fähigkeit, ganze Körperbewegungen eines Menschen auf einen Roboter zu übertragen, spielt eine entscheidende Rolle für den Fortschritt hin zu generalisierter Robotikintelligenz. Das Teleoperierte Ganzkörper-Imitationssystem, kurz TWIST, stellt in diesem Kontext einen revolutionären Durchbruch dar und eröffnet neue Möglichkeiten für vielseitige, natürliche und präzise humanoide Robotersteuerung. Traditionelle teleoperierte Systeme fokussieren sich meist auf einzelne Bereiche wie das Gehen, Greifen oder andere isolierte Bewegungen. Diese eingeschränkte Betrachtung führt oft zu mangelnder Koordination zwischen den verschiedenen Körperteilen, was die Vielseitigkeit und den praktischen Einsatz der Roboter erheblich limitiert.
TWIST dagegen basiert auf einem ganzheitlichen Ansatz, der den gesamten menschlichen Bewegungsapparat in das Steuerungskonzept einbezieht. Im Kern von TWIST steht die Übertragung menschlicher Bewegungsmuster auf humanoide Roboter. Hierfür werden reale menschliche Bewegungen mittels Motion-Capture-Technologie erfasst und auf die spezifische Morphologie des Roboters adaptiert. Die Bewegungsdaten werden zu sogenannten Referenzclips verarbeitet, die die Grundlage für die Imitation bilden. Dabei werden nicht nur einzelne isolierte Aktionen, sondern fließende, komplexe Bewegungsabläufe berücksichtigt, um möglichst natürliches und reaktionsschnelles Verhalten zu ermöglichen.
Ein bedeutender technischer Fortschritt bei TWIST besteht in der Entwicklung eines robusten und anpassungsfähigen Ganzkörper-Controllers. Dieser beruht auf einer Kombination aus Reinforcement Learning und Behavior Cloning. Reinforcement Learning lehrt das System, anhand von Belohnungen und Feedback optimale Bewegungsstrategien zu entwickeln, während Behavior Cloning dem System ermöglicht, Bewegungen direkt aus menschlichen Beispielen nachzuahmen. Zusammen resultiert dies in einer sehr hohen Präzision bei der Bewegungsverfolgung sowie einer bemerkenswerten Anpassungsfähigkeit an unterschiedliche Situationen und Umgebungen. Ein weiteres innovatives Element von TWIST ist die Einbeziehung sogenannter privilegierter zukünftiger Bewegungsframes in den Lernprozess.
Das bedeutet, das System hat Zugriff auf Informationen über bevorstehende Bewegungen, wodurch es proaktiv und vorausschauend agieren kann. Dies steigert die Genauigkeit bei der Umsetzung dynamischer, komplexer Bewegungen und erhöht die Reaktionsgeschwindigkeit des Roboters spürbar. TWIST bewährt sich in vielfältigen Anwendungsszenarien, die von Ganzkörpermanipulation bis zu komplexer Fortbewegung reichen. Die Fähigkeit des Systems, koordinierte Bewegungen von Armen, Beinen, Rumpf und Kopf nahtlos zu synchronisieren, eröffnet neue Horizonte für den Einsatz humanoider Maschinen in der Industrie, im Rettungsdienst oder in der Unterhaltungsbranche. Insbesondere legte TWIST unter Beweis, dass ein einziger, einheitlicher neuronaler Netzwerkcontroller ausreichend ist, um diese breite Palette von Fähigkeiten abzudecken und für verschiedenste Aufgaben anzupassen.
Die technische Grundlage von TWIST basiert auf der engen Integration von realer Motion-Capture-Technologie mit modernen maschinellen Lernverfahren. Menschen tragen beim Motion Capture spezielle Anzüge oder Sensoren, welche die exakten Bewegungsdaten aufnehmen. Diese Daten werden dann an das neuronale Netzwerk weitergeleitet, das sie verarbeitet und in eine für den humanoiden Roboter verständliche Steuerung übersetzt. Die Herausforderung dabei besteht darin, die Unterschiede zwischen menschlicher Anatomie und der des Roboters auszugleichen. TWIST löst dies durch adaptive Retargeting-Methoden, welche jeden einzelnen Bewegungsaspekt so anpassen, dass der Roboter trotz physikalischer Diskrepanzen die Bewegung originalgetreu nachahmt.
Ein entscheidender Vorteil der Ganzkörper-Steuerung liegt in der erhöhten Flexibilität und Ausdrucksfähigkeit des Roboters. Während frühere Systeme oft nur simple Handgriffe oder standardisierte Gangarten ermöglichten, erlaubt TWIST eine nahezu natürliche und flüssige Bewegungsvielfalt. Dies umfasst zum Beispiel das gleichzeitige Tragen und Balancieren schwerer Gegenstände, kontrolliertes Klettern oder sogar emotionale Gestikulationen, die in vielen Anwendungsgebieten von großer Bedeutung sind. Die Entwicklung von TWIST markiert einen wichtigen Schritt in Richtung intuitiver Mensch-Roboter-Interaktion. Indem die menschliche Körpersprache als Schnittstelle genutzt wird, wird die Bedienung der Roboter stark vereinfacht und ermöglicht eine unmittelbare Übertragung komplexer Aufgaben.
So müssen Bediener nicht mehr einzelne Gelenke oder Aktionen manuell steuern, sondern können den Roboter mit ihrem gesamten Körper steuern. Dies führt zu einer bedeutenden Effizienzsteigerung und ermöglicht auch weniger spezialisierten Anwendern den Umgang mit hochkomplexen Robotersystemen. Neben den praktischen Vorteilen bietet TWIST auch wichtige Impulse für die wissenschaftliche Forschung. Die Verbindung von Behavior Cloning mit Reinforcement Learning in einem realweltlichen Setting liefert wertvolle Erkenntnisse für die Entwicklung robuster, selbstlernender Systeme. Darüber hinaus zeigt die Einbindung zukünftiger Bewegungsdaten, wie Vorhersagen in der Robotersteuerung integriert werden können, um die Qualität und Sicherheit dynamischer Bewegungen zu verbessern.
Zudem trägt TWIST zur Weiterentwicklung der allgemeinen Robotik bei, indem es die Grenzen der Teleoperation verschiebt. Die Möglichkeit, einen humanoiden Roboter in Echtzeit und mit kompletter Ganzkörperkontrolle zu bedienen, stellt eine Voraussetzung dar für Anwendungen, die hochkomplexe menschliche Tätigkeiten involvieren. Denkbar sind etwa Such- und Rettungseinsätze in gefährlichen Umgebungen, in denen menschliche Helfer nur eingeschränkt agieren können. Auch in der industriellen Fertigung könnten mithilfe solcher Technologien Robotersysteme nahtlos in bestehende Arbeitsprozesse integriert werden. Die technische Umsetzung wurde umfassend getestet und validiert.
Die Forschergruppe hinter TWIST analysierte systematisch verschiedene Aspekte der Bewegungsverfolgung und Steuerungsqualität. Die Resultate zeigen, dass die Kombination aus adaptivem Verhalten, vorausschauendem Lernen und realistischer Bewegungsdatenbasis zu signifikanten Verbesserungen bei Koordination, Stabilität und Reaktionsgeschwindigkeit führt. Zauberhaft erscheint auch die Tatsache, dass TWIST mit nur einem einzigen neuronalen Netzwerk auskommt, obwohl es eine enorme Vielfalt an Bewegungsaufgaben beherrscht. Diese Vereinheitlichung vereinfacht sowohl die Trainingsphase als auch den praktischen Einsatz erheblich und stellt eine hochmoderne Lösung im Vergleich zu früheren fragmentierten Steuerungsansätzen dar. Nicht zuletzt hat TWIST großes Potenzial, die soziale Akzeptanz humanoider Roboter zu erhöhen.
Die Fähigkeit, Bewegungen des Menschen präzise und natürlich nachzuahmen, sorgt für eine bessere Verständigung und ein vertrautes Miteinander zwischen Mensch und Maschine. Dies ist besonders in Bereichen wie Pflege, Therapie oder Bildung von Bedeutung, wo empathische Interaktion essenziell ist. Zusammenfassend stellt TWIST eine bahnbrechende Innovation auf dem Gebiet der Robotik dar, die durch die Kombination moderner Machine-Learning-Techniken und präziser Motion-Capture-Daten ein neues Niveau der humanoiden Teleoperation ermöglicht. Diese Technologie bringt den Traum von intelligenten, vielseitigen und intuitiv steuerbaren Robotersystemen näher an die Realität und ebnet den Weg für zahlreiche neue Einsatzgebiete. Mit dem dynamischen Fortschritt von TWIST zeigt sich eindrucksvoll, wie tief verwurzelt die Verbindung zwischen menschlicher Bewegung und technologischer Umsetzung sein kann.
Die Zukunft der robotischen Teleoperation liegt in der Verschmelzung von Körper, Geist und Maschine, wie es TWIST in beispielhafter Weise verwirklicht.