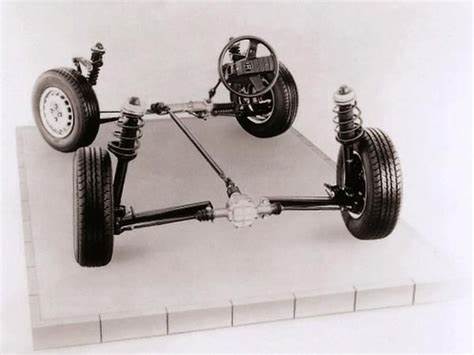
Die vier-Rad-Lenkung, oft als 4WS abgekürzt, ist eine Technologie, die es ermöglicht, nicht nur die Vorderräder, sondern auch die Hinterräder eines Fahrzeugs aktiv zu lenken. Dieses faszinierende Konzept bietet zahlreiche Vorteile, vor allem in puncto Wendigkeit und Fahrstabilität, doch seine Geschichte ist von Höhen und Tiefen geprägt. Obwohl die Realität der vier-Rad-Lenkung heute in luxuriösen Limousinen, sportlichen SUVs und modernen Elektrofahrzeugen wieder Fahrt aufgenommen hat, begann ihre Entwicklung bereits vor mehr als einem Jahrhundert. Die Ursprünge der vier-Rad-Lenkung lassen sich bis in die Anfänge des 20. Jahrhunderts zurückverfolgen.
Erste Beispiele finden sich in amerikanischen Nutzfahrzeugen wie dem Cotta Cottamobile oder den schweren ¾- bis 10-Tonnen-Lkw. Diese Pioniere der Fahrzeugtechnik hatten bereits Systeme, die eine Lenkung aller vier Räder ermöglichten, wobei der große Vorteil in der damaligen Zeit vor allem darin bestand, die Manövrierfähigkeit von großen, oftmals langsamen und schwerfälligen Lastwagen zu verbessern. Die Technologie blieb jedoch lange eher ein Nischenprodukt, da sowohl die Komplexität als auch die Kosten eine breitere Anwendung verhinderten. Im Laufe des 20. Jahrhunderts wurde die vier-Rad-Lenkung immer wieder neu entdeckt und verfeinert, wobei besonders in den 1980er Jahren bedeutende Fortschritte erzielt wurden.
Diese Dekade markierte den Beginn der Integration moderner aktiver 4WS-Systeme, die von zahlreichen Automobilherstellern als innovative Features in Konzept- und Serienfahrzeugen präsentiert wurden. Unter diesen war Honda führend, als der Hersteller im Jahr 1988 die vier-Rad-Lenkung im Prelude Si einführte. Diese erste moderne Realisierung setzte auf ein rein mechanisches System, das durch eine komplexe Kombination aus Zahnrädern und einer Welle eine dynamische Steuerung der Hinterräder im Verhältnis zur Lenkbewegung an den Vorderrädern ermöglichte. Dabei gab es zwei grundsätzliche Modi: Bei kleinen Lenkwinkeln drehten sich die Hinterräder in gleicher Richtung wie die Vorderräder, ein Verfahren, das die Stabilität bei hohen Geschwindigkeiten erhöhte. Bei großen Lenkwinkeln drehten die Hinterräder entgegengesetzt zu den Vorderrädern, was den Wendekreis verkürzte und die Manövrierfähigkeit im Stadtverkehr oder auf engen Parkplätzen verbesserte.
Parallel zu Honda entwickelte Nissan mit seiner HICAS-Technologie eine vier-Rad-Lenkung, die auf computergesteuerten hydraulischen Aktuatoren basierte. Diese Systeme waren in der Lage, die Hinterräder je nach Geschwindigkeit und Lenkwinkel variabel zu steuern. Während bei niedrigen Geschwindigkeiten die Lenkung der Hinterräder nicht aktiviert war, wurden bei höheren Geschwindigkeiten ausgeklügelte Phasenwechsel vorgenommen, um etwa die Agilität bei schnellen Spurlinienwechseln zu verbessern. Dieses elektronische System war ein Schritt Richtung digital gesteuerter Fahrzeugdynamik und hob die vier-Rad-Lenkung auf ein neues technisches Niveau. Andere Hersteller wie Mazda und Mitsubishi experimentierten ebenfalls mit dieser Technologie, setzten die vier-Rad-Lenkung in einigen Modellen ein und trieben die Entwicklung voran.
Trotz der technischen Erfolge und der positiven Resonanz bei Fachkritikern konnte sich die vier-Rad-Lenkung jedoch nicht flächendeckend durchsetzen. Der Grund lag nicht unbedingt in der Funktionalität, sondern vielmehr an den hohen Kosten für Entwicklung und Produktion. Darüber hinaus führte die komplexere Mechanik zu Bedenken hinsichtlich der Haltbarkeit, besonders bei Fahrzeugen, die für schwere Einsätze und Alltagsgebrauch konzipiert waren. Zudem trug die wirtschaftliche Entwicklung, wie die starke Aufwertung des japanischen Yen in den 1980er Jahren, dazu bei, dass mit der vier-Rad-Lenkung ausgestattete Fahrzeuge im Ausland deutlich teurer wurden, was sich negativ auf den Absatz auswirkte. Ein weiteres bedeutendes Kapitel in der Geschichte der vier-Rad-Lenkung schreiben Pickup-Trucks des 21.
Jahrhunderts. Während die Idee von vier-Rad-Lenkung in Lastwagen keineswegs neu war, war General Motors mit seiner Quadrasteer-Technologie in den frühen 2000er Jahren der einzige Hersteller, der ein solches System kommerziell in Pickup-Trucks anbot. Quadrasteer ermöglichte einen um 22 Prozent verringerten Wendekreis durch bis zu 15 Grad entgegengesetzt lenkende Hinterräder bei niedrigen Geschwindigkeiten, während bei höheren Geschwindigkeiten eine geringfügige gleichsinnige Lenkung für mehr Stabilität sorgte. Dieses System berücksichtigte auch die Anforderungen beim Anhängerbetrieb, indem es die Lenkung bei angehängtem Trailer anpasste, um eine Beschädigung durch übermäßige Querwinkel zu vermeiden. Trotz dieser technischen Finessen scheiterte Quadrasteer kommerziell vor allem an der Preisgestaltung.
Mit einem Aufpreis von über 5.000 US-Dollar war die Option für viele Kunden unattraktiv, zumal Bedenken hinsichtlich der Langzeitverlässlichkeit und der Wartungskosten vorhanden waren. Heute erlebt die vier-Rad-Lenkung eine Renaissance, besonders ausgelöst durch die technischen Möglichkeiten, die moderne Sensorik, Elektronik und Software-Integration bieten. Hersteller wie Mercedes-Benz statteten bereits mehrere Baureihen wie die EQS, die S-Klasse und E-Klasse mit ausgereiften 4WS-Systemen aus. Auch GM bringt die Technologie in Elektromodellen wie dem neuen Silverado und dem Hummer EV zum Einsatz.
Diese Systeme erlauben neben der bekannten Verbesserung der Wendigkeit auch sogenannte „crabwalk“-Manöver, bei denen das Fahrzeug seitwärts bewegt werden kann, ohne die Fahrtrichtung zu wechseln. Dies eröffnet neue Perspektiven für das Manövrieren in engen Parkhäusern oder Gelände. Premiumhersteller wie Porsche und Audi nutzen ebenfalls vier-Rad-Lenkung, um sowohl die sportliche Performance als auch den Fahrkomfort zu maximieren. Vor allem im Hochgeschwindigkeitsbereich sorgen die Systeme für eine gesteigerte Spurtreue und Agilität, was in Kurvenfahrten und bei schnellen Spurwechseln deutlich spürbar wird. Gleichzeitig führt die vier-Rad-Lenkung zu einer Reduzierung von Unter- oder Übersteuern und verbessert das Sicherheitsgefühl.
Die grundlegenden Vorteile der vier-Rad-Lenkung sind heute trotz technischer Weiterentwicklungen unverändert geblieben. Im Stadtverkehr oder anderen Situationen mit langsamer Fahrt sorgt die gegenläufige Lenkung der Hinterräder für einen kleineren Wendekreis, was das Rangieren erheblich erleichtert. Bei hohen Geschwindigkeiten steigert die gleichsinnige Lenkung der Hinterräder die Stabilität des Fahrzeugs und erleichtert dynamische Fahrmanöver. Dadurch entsteht ein deutliches Plus an Fahrkomfort und Sicherheit. Zusammenfassend lässt sich sagen, dass die Technologie der vier-Rad-Lenkung eine bedeutende Innovation in der Automobilgeschichte darstellt.
Ihre Entwicklung verlief von den einfachen mechanischen Anfängen über mechanisch-elektrische Hybridlösungen hin zur vollständigen elektronischen Steuerung. Wirtschaftliche und technische Herausforderungen führten bisher dazu, dass die Verbreitung dieser Technik beschränkt blieb. Doch mit dem zunehmenden Stellenwert von Fahrassistenzsystemen, digitaler Fahrzeugsteuerung und der Elektrifizierung des Antriebs steigen auch die Chancen der vier-Rad-Lenkung auf breite Anwendung. Die kommenden Jahre werden zeigen, wie tief diese Technologie in Alltag und sportlicher Mobilität verwurzelt sein wird. Bereits jetzt ist klar, dass die vier-Rad-Lenkung ein entscheidender Baustein für eine sichere, effiziente und angenehme Fahrweise der Zukunft ist – von der engen Stadtgasse bis hin zur temporeichen Landstraße.
Die Geschichte der vier-Rad-Lenkung ist somit kein abgeschlossener Entwicklungszyklus, sondern ein lebendiges Kapitel moderner Fahrzeugtechnik, das weiterhin mit Innovationen bedacht wird und für den Fahrer von morgen neuen Spielraum eröffnet.