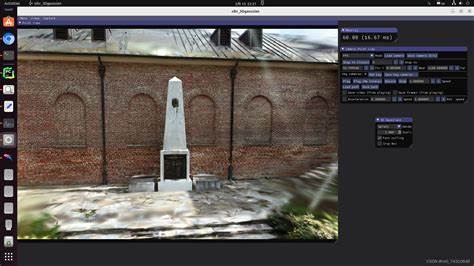
Die Visualisierung komplexer 3D-Szenen ist in zahlreichen Bereichen der Technik und Forschung von zentraler Bedeutung, besonders wenn es um Robotik, autonome Systeme und virtuellen Konstruktion geht. ROSplat setzt hier neue Maßstäbe, indem es als erster Online-Visualizer auf ROS2-Basis die fortschrittliche Gaussian Splatting-Technologie nutzt. Diese Lösung ermöglicht es, Millionen von Gaußschen Kugeln auf effiziente und GPU-beschleunigte Weise in Echtzeit zu rendern. Die Kombination aus ROS2, modernen Grafiktechnologien und maßgeschneiderten Nachrichtenformaten schafft eine leistungsfähige und praxisnahe Plattform für Entwickler und Forscher gleichermaßen. Gaussian Splatting ist eine innovative Methode zur Darstellung komplexer Oberflächen oder Volumen durch das Auftragen vieler weichgezeichneter Kugeln, die sogenannten „Splats“.
Im Vergleich zu klassischen Polygonnetzen oder Punktwolken bietet diese Technik den Vorteil, dass selbst schwierig zu modellierende Strukturen mit weichen Übergängen und optischen Effekten realistisch abgebildet werden können. ROSplat nutzt genau dieses Prinzip und kombiniert es mit der Flexibilität des Robot Operating System 2 (ROS2), welches heute als führende Middleware für Robotikanwendungen gilt. Diese Kombination erlaubt nicht nur eine außergewöhnlich realistische Visualisierung, sondern auch eine simple Einbindung in bestehende Robotik- und Sensorsysteme. Eine der wichtigsten Eigenschaften von ROSplat ist die Echtzeitfähigkeit. Dank des Einsatzes moderner GPU-Technologien wie CUDA und OpenGL wird die aufwändige Berechnung und das Sortieren der Gauss-Splats so effizient ausgeführt, dass selbst Szenen mit mehreren Millionen Einzelobjekten flüssig dargestellt werden können.
Diese Leistung setzt jedoch eine geeignete Hardware mit Nvidia-Grafikkarte voraus, wodurch die Visualisierung ohne entsprechende GPU stark an Performance verliert. Für Anwender bedeutet das, dass sie durch die Nutzung entsprechender GPU-Ressourcen eine bisher unerreichte Detailtiefe in der 3D-Darstellung erreichen können, was gerade im Feld der Robotik und Simulationsforschung essenziell ist. Die Einbindung in ROS2 sorgt für eine nahtlose Kommunikation und Datenübertragung zwischen verschiedenen Komponenten eines Robotersystems oder zwischen Simulationsmodulen. Hierzu wurden eigens maßgeschneiderte ROS2-Nachrichtentypen entwickelt – SingleGaussian und GaussianArray – die alle relevanten Eigenschaften eines Gaußsplats wie Position, Rotation, Skalierung, Opazität und sogar sphärische Harmonische enthalten. Somit ist es möglich, sehr feingliedrige und vielfältige Informationen zu übermitteln, die dann vom Visualizer unmittelbar verarbeitet und dargestellt werden.
Dieser modulare Ansatz erleichtert nicht nur die Integration in bestehende ROS2-Workflows, sondern stellt auch sicher, dass die Kommunikation zwischen Publishern und Subscriber stabil und effizient bleibt. Die Nutzung von PLY-Dateien als Eingabeformat erweitert die Flexibilität von ROSplat zusätzlich. PLY ist ein weit verbreitetes Format für die Speicherung von 3D-Punktwolken und Oberflächen, das häufig von Scannern und anderen Sensoren verwendet wird. Dadurch können Nutzer bestehende Datensätze einfach importieren und in der Visualisierung weiterverarbeiten. Die Unterstützung dieses Formats sorgt dafür, dass ROSplat auch als Analyse- oder Präsentationswerkzeug in verschiedenen Anwendungsbereichen dienen kann – von der industriellen Qualitätskontrolle über die architektonische Planung bis hin zu wissenschaftlichen Visualisierungen.
Vor allem die technische Umsetzung der GPU-Beschleunigung mit Bibliotheken wie Cupy und PyTorch sowie die Integration der externen gsplat-Bibliothek für CUDA-Rendering machen ROSplat zu einem kraftvollen Werkzeug. Diese Komponenten sorgen dafür, dass Sorting-Operationen, die für das realistische Rendering von Gauss-Kugeln unverzichtbar sind, optimal auf modernster Hardware laufen. Die Software ist so konzipiert, dass sie automatisch die effizienteste Methode auswählt, abhängig von der Verfügbarkeit der Bibliotheken – zuerst PyTorch, dann Cupy und zuletzt CPU-basiert. Das sorgt für maximale Performance in unterschiedlichsten Umgebungen und erlaubt es Entwicklern, flexibel zwischen verschiedenen Installationstypen zu wählen. Ein weiteres Highlight ist die Docker-Umgebung, die ROSplat bereitstellt.
Durch den Einsatz von Docker-Containern wird die Installation und Einrichtung der komplexen Abhängigkeiten drastisch vereinfacht. Nutzer profitieren davon, dass alle notwendigen Bibliotheken, Tools und Einstellungen in isolierten Umgebungen gebündelt sind und ohne das Risiko von Konflikten auf verschiedenen Systemen gestartet werden können. Wichtig ist dabei die Verwendung des nvidia-container-toolkits, welches die GPU-Anbindung im Container ermöglicht. Selbst für Einsteiger ist es somit möglich, die Leistungsfähigkeit von ROSplat zu testen und produktiv zu nutzen, ohne die sonst üblichen umfangreichen Setups auf dem Hostsystem durchführen zu müssen. Die Community rund um ROSplat ist aktiv und offen für Beiträge.
Das Projekt erhält Feedback und Verbesserungen, was auf die offene Architektur und die Nutzung populärer Plattformen wie GitHub zurückzuführen ist. Die Entwickler hinter ROSplat sind bestrebt, die Software kontinuierlich weiterzuentwickeln, optimieren die Algorithmen und erweitern die Funktionalität, um den wachsenden Anforderungen der Forschung und Industrie gerecht zu werden. Somit können Nutzer sicher sein, dass sie auf eine nachhaltige und moderne Lösung setzen, die technisch auf dem neuesten Stand bleibt. Mit ROSplat eröffnen sich breite Anwendungsmöglichkeiten. In der Robotik lässt sich die Visualisierung von Umgebungen und Sensordaten wesentlich verbessern, was die Entwicklung und das Testen autonomer Systeme erleichtert.
In der Forschung kann die detaillierte Darstellung von Messdaten oder Simulationen neue Einblicke gewähren. Industrien profitieren von der präzisen und schnell verfügbaren 3D-Kommunikation, etwa im Bereich der Fertigung oder Inspektion. Zudem bietet die Kombination aus ROS2 und GPU-beschleunigtem Gaussian Splatting eine Grundlage für anspruchsvolle virtuelle und erweiterte Realitäten, die für Schulungen, Planung oder Design genutzt werden können. Die Installation von ROSplat erfordert einige Grundvoraussetzungen, wie eine Installationsumgebung unter Ubuntu 24.04 LTS mit ROS2 Jazzy.
Neben den Grundpaketen sind insbesondere für eine GPU-beschleunigte Nutzung spezielle Python-Bibliotheken notwendig. Die Dokumentation bietet hierfür klare Anweisungen, wie zum Beispiel die individuelle Installation von Cupy, PyTorch und gsplat, um die optimale Leistung auszuschöpfen. Für Szenarien ohne GPU-Unterstützung steht eine reduzierte Version der Abhängigkeiten bereit, die dennoch eine funktionale Nutzung ermöglicht. Durch die klare Trennung dieser Optionen können Nutzer ihre lokale Umgebung flexibel anpassen. Zusammenfassend stellt ROSplat einen Meilenstein dar, wenn es darum geht, 3D-Szenen visuell anspruchsvoll und technisch hochwertig mit ROS2 zu verbinden.
Die innovative Anwendung von Gaussian Splatting, gepaart mit moderner GPU-Beschleunigung, macht Echtzeit-Visualisierung von Millionen Einzelobjekten möglich. Gleichzeitig sorgt der strukturierte Aufbau mit eigenen ROS2-Nachrichtenformaten für eine einfache Integration in komplexe Robotik- und Sensorsysteme. Die Möglichkeit, fertige 3D-Daten aus PLY-Dateien einzulesen, erleichtert den Einstieg und erweitert den Anwendungsbereich signifikant. Für Anwender, die auf der Suche nach einer leistungsfähigen, flexiblen und modernen Lösung für komplexe Visualisierungen sind, bietet ROSplat eine ideale Kombination aus State-of-the-Art-Technik und benutzerfreundlicher Umsetzung. Langfristig wird ROSplat voraussichtlich eine wichtige Rolle in der Weiterentwicklung von Robotiktools und Visualisierungstechnologien spielen.
Die Fokussierung auf Performance, Modularität und offene Standards sorgt dafür, dass das Projekt sowohl für aktuelle als auch zukünftige Anforderungen im Bereich der 3D-Visualisierung bestens gerüstet ist. Die aktive Community und der regelmäßige Austausch fördern zudem Innovationen und die Integration neuer Features, die ROSplat zu einer nachhaltigen und zukunftssicheren Lösung machen. Für Entwickler und Forscher, die auf Praxistauglichkeit und technische Exzellenz setzen, ist diese Open-Source-Software eine vielversprechende Option, die weiter an Bedeutung gewinnen wird.