Die Wegfindung in Gittern stellt eine zentrale Herausforderung in vielen Bereichen der Informatik dar, etwa in der Robotik, der künstlichen Intelligenz sowie in der Spieleentwicklung. Eine der bekanntesten Algorithmenlösungen dafür ist der A*-Suchalgorithmus, der durch seine Effizienz und garantierte Optimalität überzeugt. Allerdings bringt A* bei der Anwendung auf großen Gittern oft Performanceprobleme mit sich, denn er untersucht viele Zwischenschritte, die theoretisch redundant sind. Genau hier setzt Jump Point Search (JPS) an, eine innovative Methode, die A* um eine entscheidende Komponente erweitert und aus diesem Grund zunehmend an Bedeutung gewinnt.Jump Point Search wurde ursprünglich von Daniel Harabor und Alban Grastien entwickelt und erstmals 2011 vorgestellt.
Das Hauptziel des Verfahrens ist es, die Suche in uniformen Gittern schneller zu machen, indem überflüssige Suchknoten anhand von graphpruning-Prinzipien eliminiert werden. Das bedeutet, dass bestimmte Knoten übersprungen werden, sobald man daraus auf die Unveränderlichkeit des Pfades schließen kann. Statt Schritt für Schritt zu gehen, springt der Algorithmus also mehrere Felder auf einmal – horizontal, vertikal oder diagonal – und spart dadurch sowohl Rechenzeit als auch Speicherplatz.Einer der großen Vorteile von JPS ist, dass trotz dieser Optimierungen die vollständige Optimalität des Pfades erhalten bleibt. Wer auf der Suche nach einem schnelleren Algorithmus ist, muss also nicht mit weniger exakten Ergebnissen rechnen.
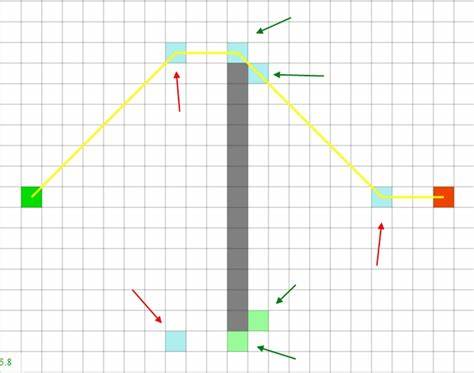
Zudem kann JPS die Laufzeit der Pfadsuche gegenüber A* um eine ganze Größenordnung reduzieren. In der Praxis bedeutet dies, dass Anwendungen, die bislang aufgrund von Verzögerungen bei der Routenberechnung Einschränkungen hatten, nun deutlich flüssiger und responsiver funktionieren können.Die Funktionsweise von Jump Point Search basiert auf zwei zentralen Prinzipien: dem Auffinden sogenannter Jump Points sowie dem Neighbor Pruning. Bei JPS wird nicht jeder Punkt auf dem Gitter als potenzieller Nachfolger des aktuellen Knotens betrachtet. Stattdessen sucht der Algorithmus nach sogenannten Sprungpunkten (Jump Points) – das sind Schlüsselpositionen, die bewegungstechnisch relevant sind, etwa an Kanten von Hindernissen oder an Stellen, an denen die Bewegungsrichtung geändert werden kann.
Durch neighbor pruning werden alle anderen Nachbarn ausgeschlossen, die den Pfad nicht verbessern können oder redundant sind. Diese gezielte Auswahl reduziert die Anzahl der Knoten, die verarbeitet werden müssen, signifikant.Die ursprüngliche Variante des Algorithmus erlaubte sogenanntes Corner-Cutting, also das Schneiden von Ecken, was allerdings nur bei punktförmigen Agenten ohne realistischen Platzbedarf praktikabel ist. In realen Anwendungen, etwa in der Robotik oder bei Spielfiguren großen Ausmaßes, ist dieses Verhalten meist unerwünscht, da es Kollisionsrisiken birgt. Aus diesem Grund haben die Autoren später verbesserte Versionen von JPS entwickelt, die Corner-Cutting unterbinden und so breitere Einsatzmöglichkeiten garantieren.
Die Algorithmen berücksichtigen in der Folge die physikalischen Abmessungen des Agenten und bieten somit eine robustere Lösung für echte Umgebungen.Eine weitere interessante Entwicklung in der Historie von Jump Point Search ist die Einführung von Vorverarbeitungsmethoden zur Optimierung der Online-Suche. Statt jedes Mal während der Pfadfindung alle möglichen Sprünge zu berechnen, können bestimmte Jump Points und Sprungvektoren im Vorfeld berechnet und gespeichert werden, was die Laufzeit noch weiter verkürzt. Besonders in statischen Umgebungen, wie fest definierten Spielfeldern oder bekannten Roboternavigationsgebieten, eröffnen solche Pre-Processing-Mechanismen neue Möglichkeiten, die Suchgeschwindigkeit um ein Vielfaches zu erhöhen.Neben den Leistungsverbesserungen trägt JPS auch dazu bei, dass die Entwicklung komplexer Navigationssysteme einfacher und effizienter wird.
Klassische A*-Implementierungen erfordern oftmals viel Aufwand für Feinjustierungen und Heuristikoptimierungen, um akzeptable Suchzeiten zu erzielen, während Jump Point Search eine elegantere und zugleich effektivere Methodik bietet. Die strukturierte Art der Suche beeinflusst auch die Vorhersagbarkeit des Algorithmus und erleichtert somit Debugging und Weiterentwicklung.Trotz all dieser Vorteile stößt Jump Point Search jedoch an Grenzen, insbesondere in seiner Voraussetzung auf uniforme Kostenstrukturen im Raster und auf homogene Agentengrößen. Das bedeutet, dass der Algorithmus nicht direkt auf mehrdimensionale oder gewichtsvariable Gitter angewendet werden kann, was in komplexeren Umgebungen wie etwa der dynamischen Navigation in städtischen Gebieten problematisch sein kann. Aus diesem Grund beschäftigt sich die aktuelle Forschung mit Erweiterungen und Kombinationsansätzen, bei denen JPS mit anderen Beschleunigungstechniken, etwa hierarchischen Gittern, kombiniert wird.
Solche hybriden Verfahren versprechen, die Stärken beider Welten zu verbinden und die Reichweite der Anwendungsmöglichkeiten zu vergrößern.Auch die Möglichkeiten zur Suche in dreidimensionalen Gittern und für Agenten mit variabler Größe sind vielversprechende Forschungsansätze. Da viele Anwendungsfälle heute nicht mehr auf zweidimensionale Raster beschränkt sind, etwa in der Luftfahrt, Unterwasserrobotik oder bei Flugregelungssystemen, sind flexible und leistungsstarke Suchalgorithmen wie JPS ein stark nachgefragtes Thema in der wissenschaftlichen Gemeinschaft und der Industrie.Im Bereich der Computerspiele hat Jump Point Search ebenfalls für Furore gesorgt. Durch die drastische Laufzeitverbesserung können Spieleentwickler komplexere und realistischere künstliche Intelligenzen implementieren, die auf großen Karten und in dynamischen Umgebungen schnelle und dennoch optimale Wegentscheidungen treffen.
Die Implementierung von JPS ermöglicht damit intensivere Spielerlebnisse mit weniger Latenz und höherer Reaktivität.In der Robotik wiederum profitiert JPS von seiner Fähigkeit, Routen in Echtzeit zu berechnen, was besonders für autonome Systeme und Roboterfahrzeuge wichtig ist. Gerade bei mobilen Robotern, die in unübersichtlichen oder engen Umgebungen manövrieren müssen, reduziert die beschleunigte Pfadsuche das Risiko von Kollisionen und erhöht die Zuverlässigkeit der Bewegung.Die Zukunft von Jump Point Search sieht vielversprechend aus. Die stetige Weiterentwicklung durch die Forschung, die Kombination mit anderen Analyse- und Beschleunigungstechniken und der zunehmende Bedarf an effizienten Navigationslösungen in vielen Technologien werden die Bedeutung dieses Verfahrens weiter steigern.