Roboter in der modernen Welt übernehmen zunehmend Aufgaben, die einst ausschließlich Menschen vorbehalten waren. Dabei scheint es auf den ersten Blick logisch, dass ein Roboterarm ein einfaches Objekt wie eine Schachfigur – in diesem Fall die Königin – problemlos von einem Feld zum anderen bewegen kann. Doch schon die Geschichte des MIT-Forschers Matthew T. Mason zeigt, dass die Realität deutlich komplizierter ist. Die sogenannte „instabile Königin“ steht symbolisch für ein grundlegendes Problem in der Robotik: Manipulation erfordert nicht nur programmierte Abläufe, sondern ein tiefes Verständnis der Unsicherheiten und Eigenheiten der physischen Welt.
Mason begann seine Arbeit mit einem einfachen Projekt, das schnell zeigte, wie präzise und dennoch anspruchsvoll robotische Manipulation sein kann. Sein Ziel war es, einen Roboterarm die Königin von einem Schachfeld auf ein anderes versetzen zu lassen. Die logische Idee schien einfach: Robotergriff zum Anfangspunkt, greifen, verschieben, loslassen. Beim ersten Versuch funktionierte das sogar perfekt. Doch als Mason das Verfahren wiederholte und wiederholte, trat ein Problem auf: Nach einigen Zügen kippte die Königin und fiel zur Seite.
Diese Instabilität ergab sich nicht wegen eines Softwarefehlers, sondern schlicht durch physikalische Ungenauigkeiten. Der Grund lag in kleinen Positionsfehlern. Wenn der Roboter die Figur nicht exakt im Zentrum des Feldes greift, sondern minimal versetzt, beginnt die Figur beim Drücken zu kippen. Nach dem Loslassen ist sie leicht geneigt und kann bei weiteren Bewegungen durch das Ausrichten und Greifen immer weiter aus der Balance geraten. So erhöhen sich die Fehler sukzessive und enden in einem unbeabsichtigten Sturz.
Diese Erkenntnis führten Mason zu der Einsicht, dass die reale Welt voll von Unsicherheiten ist, mit denen sich Roboter auseinandersetzen müssen. Das scheinbar einfache Problem der präzisen Positionierung ist bei weitem nicht trivial. Es zeigt, dass Manipulation mehr ist als nur Bewegungsausführung. Es bedeutet, die Umgebung und alle Einflüsse durch Kontakt, Reibung und Kraft zu verstehen und zu berücksichtigen. Die instabile Königin wird somit zu einem Beispiel, das einen allgemeinen Grundsatz illustriert: Jeder noch so kleine Fehler kann sich kumulieren und unvermeidbar zum Scheitern führen.
Mason stellte auch Versuche mit Markern auf einem Schneidbrett an, um das Kippen und die Bewegungen in der Praxis zu beobachten. Die Ergebnisse variierten stark, je nach Untergrund, Form oder kleinsten Unterschieden im Objekt. So konnte der Marker manchmal nach dem Kippen sogar wieder in seine Ausgangsposition schwingen, in anderen Fällen verschob er sich zusätzlich. Diese Beobachtungen verdeutlichen nochmals, wie komplex das reale physische Verhalten ist und wie schwer es ist, eine sich wiederholbare, stabile Manipulation zu gewährleisten. Eine weitere wichtige Erkenntnis ist die Rolle des Kontakts.
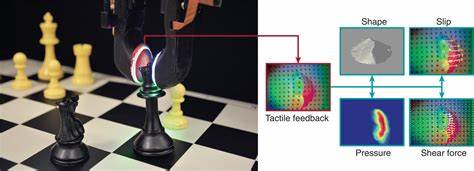
Mason erklärt, dass die meisten Probleme durch entweder eine ungenaue Positionserfassung oder Fehler beim Greifen entstehen. Im Gegensatz zur reinen visuelle Erfassung bietet der Einsatz von taktilen Informationen, also das Spüren der Berührung, eine wesentlich genauere Möglichkeit, Objekte zu erfassen. Bei der „instabilen Königin“ hätte der Roboter zum Beispiel am unteren Teil der Figur greifen können, sodass die Figur nicht kippt, sondern gleitet. Die Grundlage hierfür ist, dass die Basis der Königin durch die Schwerkraft sicher auf dem Brett steht und so als fixer Referenzpunkt fungiert. Ein Greifen am obereren Teil führt hingegen zu einem Hebeleffekt, der das Kippen beschleunigt.
Diese Kombination von physischem Kontakt und korrektem Greifen schafft ein System, das potentiell sehr genau und stabil arbeiten kann, selbst wenn die visuelle Positionsbestimmung Fehler aufweist. In der Praxis erfordert dies von Robotern, dass sie ihre Aktionen kontinuierlich auf der Basis von sowohl sensorischen Informationen als auch vorherigen Erfahrungen anpassen. Es geht also um eine Form von „intelligentem Handeln“, bei dem Fühlen und Handeln im Einklang stehen und sich gegenseitig ergänzen. Dieses Zusammenspiel zwischen Sensorik und Bewegung stellt eine der größten Herausforderungen der Robotik dar. Die sensorische Wahrnehmung ist unflexibel und fehleranfällig, wenn sie sich allein auf visuelle Daten verlässt.
Mechanische Berührung aber ermöglicht präzise und robuste Informationen über Objekte und deren Lage. Interessanterweise gibt es eine natürliche Neigung, beim Umgang mit solchen Problemen den Schwerpunkt auf das Sehen, also die visuelle Wahrnehmung, zu legen. Menschen neigen jedoch auch dazu, durch Tasten und Fühlen ein genaues Bild der Umgebung zu gewinnen – oft unbewusst. Die Robotik muss diesen dualen Ansatz übernehmen und sich nicht ausschließlich auf Kameras verlassen. Ein weiterer Punkt ist die Bedeutung und Auswirkung kleiner Details in der Realität.
So können winzige Variationen in der Form eines Objekts, minimale Schräglagen der Oberfläche oder sogar die Oberflächenbeschaffenheit drastische Folgen haben. Mason beschreibt, dass sogar unterschiedliche Marker, die auf demselben Untergrund bewegt werden, entgegengesetzte Bewegungen nach dem Kippen zeigen können. Eine derartige Empfindlichkeit macht die Modellierung und Vorhersage von Positionsfehlern äußerst schwierig. Aufgrund dieser Besonderheiten ist das reine Programmieren von festen Bewegungsabläufen in der Robotik oft nicht zielführend. Stattdessen müssen dynamische Strategien entwickelt werden, die auf wiederholten Sensorwerten basieren und Fehler kontinuierlich korrigieren.
Ein praktischer Ansatz wäre es deshalb, die Schachfigur nach jedem Zug visuell oder taktil zu inspizieren und die Position dann neu zu kalibrieren, um die Fehlerakkumulation zu stoppen. Es sind genau solche Konzepte, die in der Forschung rund um Reinforcement Learning zu neuen Fortschritten führen: Roboter lernen, in unsicheren Umgebungen zu agieren und aus Fehlern zu adaptieren. Innerhalb menschlicher Manipulation zeigen sich ähnliche Prinzipien. Beispielsweise verwenden Menschen oft die Umgebung als Hilfsmittel, reißen Begrenzungen an oder nutzen die Reibung aus, um Objekte stabil zu positionieren. Diese „Basin of Attraction“ – charakteristische Formen, in die Objekte bei Kontakt zurückfallen – erhöhen die Genauigkeit und reduzierte Fehler bei komplexen Bewegungen.
Für Roboter wäre die Umsetzung solcher Mechanismen eine große Bereicherung, da sie so eine erhöhte Präzision erlangen können, ohne immer auf teure und fehleranfällige Sensortechnik angewiesen zu sein. Ein Praxisbeispiel aus der Wissenschaft zeigt auch die Juggle-Experimente von Chris Atkeson: Der Roboter muss Bälle hochwerfen und fangen, wobei Ungenauigkeiten einen großen Einfluss haben. Durch künstliche „Trichter“ oder physische Führungselemente werden die Bälle so geführt, dass mögliche Fehler beim Fangen minimiert und die Gesamtdynamik stabilisiert werden. Dieses Prinzip lässt sich auch auf das Greifen von Objekten übertragen: Physische Einschränkungen oder kontrollierte Bewegungsspielräume können den Effekt von Unsicherheiten kompensieren. Abschließend lässt sich sagen, dass die Diagnose der instabilen Königin weit über das einzelne Beispiel hinausgeht und Grundprinzipien menschlicher und robotischer Manipulation anspricht.
Die Herausforderungen liegen in der Kombination aus sensorischer Unschärfe, physikalischer Instabilität und der Notwendigkeit, durch Kontaktstrategien präzise und verlässlich zu handeln. In Zukunft werden Lösungen, die diese Zusammenhänge entschlüsseln und Nutzbarmachen, die Fähigkeit von Robotern revolutionieren, die reale Welt sicher und effizient zu meistern. Manipulation bedeutet damit letztlich, intelligent mit der Komplexität der Realität umzugehen – und diese Realität erweist sich als weitaus instabiler und schwieriger zu beherrschen, als es auf den ersten Blick erscheint.