Die kinematische Hand-Skelett-Optimierung stellt einen bedeutenden Fortschritt im Bereich der Bewegungsanalyse und Robotik dar. Mit der Fähigkeit, Bewegungen der menschlichen Hand präzise zu erfassen, zu modellieren und simulieren, eröffnet diese Technologie vielfältige Möglichkeiten für Forschung, Industrie und interaktive Anwendungen. Besonders durch die Integration der Open-Source-Bibliothek JAX gewinnt das Verfahren zunehmend an Bedeutung, denn JAX ermöglicht effiziente Berechnungen im Bereich maschinellen Lernens und differenzierbarer Programmierung und bietet dabei eine hervorragende Performance auf modernen Hardwareplattformen wie GPUs und TPUs. Das Herzstück dieses Ansatzes liegt in der Kombination von kinematischen Modellen mit Optimierungsverfahren. Dabei wird ein vorgegebenes Skelettmodell der Hand genutzt, das die anatomische Struktur realistisch nachbildet.
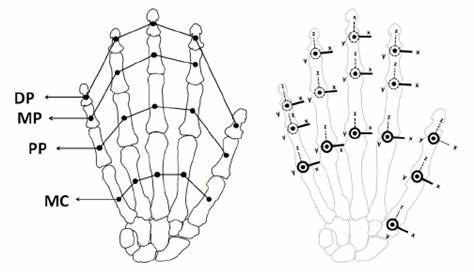
Dieses Modell besteht aus Knochenelementen und Gelenken, die zueinander in definierten Beziehungen stehen. Die Gestalt einer Hand wird durch Gelenkwinkel repräsentiert, welche als Freiheitsgrade dienen und es erlauben, vielfältige Haltungen und Bewegungen abzubilden. Kinematische Modelle berücksichtigen gleichzeitig auch physikalische und anatomische Beschränkungen, etwa maximale Beugungswinkel oder Knochenlängen, um das Modell realistisch und nachvollziehbar zu gestalten. Die Modelloptimierung erfolgt durch sogenannte inverse Kinematik. Hierbei werden beobachtete 3D-Daten der Handpositionen und Gelenkstellungen als Referenzpunkte verwendet, um die bestmöglichen Winkel des kinematischen Skeletts rechnerisch zu ermitteln.
Dieser Prozess ist eine herausfordernde Optimierungsaufgabe, da viele Freiheitsgrade und Unsicherheiten in den Sensordaten vorliegen. Genau hier zeigt die Integration von JAX ihre Stärken, denn dank automatischer Differenzierbarkeit und optimiertem GPU-Support können Gradienten effizient berechnet und Optimierungsalgorithmen schneller ausgeführt werden. Die Differenzierbarkeit erlaubt es zudem, Verlustfunktionen direkt auf 2D-Fehler in Bildpunkten aufzubauen und diese über mehrere Kameras oder Sensordaten zu minimieren. Ein wichtiger Anwendungszweck dieser Technologie ist die zeitgleiche Erfassung von multi-kamerabasierten Aufnahmen der Hand, zum Beispiel bei Multiview-Videoaufnahmen. Diese Aufnahmen dienen als Input für die Pipeline, in der zunächst in jedem Frame 2D-Schlüsselpunktdetektoren die relevanten Gelenkpunkte in den Bildern erkennen.
Anschließend werden mit Hilfe von Kamerakalibrierung und Triangulation dreidimensionale metrische Positionen der Gelenke berechnet. Der nächste Schritt umfasst die Umwandlung dieser Positionen in Gelenkwinkel durch inverse Kinematik. Abschließend erfolgt eine Validierung mittels Forward Kinematik, um sicherzustellen, dass die rekonstruierten Gelenkstellungen dem Modell und den realen Bewegungen entsprechen. Die Vorteile der kinematischen Hand-Skelett-Optimierung sind dabei vielfältig. Erstens erlaubt sie eine rig-agnostische Repräsentation, das heißt, die Bewegungen sind nicht an ein bestimmtes Handmodell oder Avatar gebunden.
Dies ermöglicht eine einfache Übertragung (Retargeting) zu beliebigen Robotern, virtuellen Händen oder anderen mechanischen Systemen. Zweitens ist die Datenkompression enorm effizient: Anstatt komplette 3D-Punktwolken zu speichern, werden lediglich Gelenkwinkel (~60 Werte pro Frame) benötigt. Drittens können physiologische Randbedingungen wie Gelenkgrenzen oder Knochendistanzen direkt eingebaut werden, was die Stabilität und Plausibilität der Ergebnisse deutlich erhöht. Darüber hinaus ist die kinematische Optimierung in Kombination mit JAX ideal für Sensordatenfusion. Neben klassischen Kameradaten können etwa IMU-Sensoren oder Markertracking eingebunden werden, was die Robustheit und Genauigkeit der Handposeerkennung in realen Szenarien erheblich verbessert.
Dies schafft wichtige Voraussetzungen für Anwendungen in der Virtual Reality, Augmented Reality und Robotik, bei denen eine latenzarme, präzise Erfassung und Steuerung mechanischer Hände essenziell ist. Die Umsetzung dieser Pipeline erfolgt klassischerweise in Python, wobei JAX als Basisbibliothek die Kernberechnungen und Optimierungen übernimmt. Das Open-Source-Projekt „pi0-lerobot“ auf GitHub liefert hierfür ein gut dokumentiertes Repository, das alle Schritte von der Datenerfassung über Kalibrierung, 2D und 3D Pose-Estimation bis zur kinematischen Handoptimierung umfasst. Dieses Projekt unterstützt Linux-Systeme und bietet gleichzeitig Tutorials und Beispielnotebooks, die den Einstieg in die komplexen Abläufe erleichtern. Die Zukunft der kinematischen Hand-Skelett-Optimierung liegt in der weiteren Verfeinerung der Modelle, der Integration zusätzlicher Sensordaten und der Echtzeitfähigkeit.
Das Ziel ist es, möglichst natürliche und menschenähnliche Bewegungen in Echtzeit abzubilden, um durch verbesserte Teleoperation, Robotiksteuerung und immersive Anwendungen neue Möglichkeiten zu schaffen. Zudem eröffnet die kombinierte Nutzung von maschinellem Lernen und physikalischer Modellierung spannende Perspektiven für autonome Systeme, die von menschlichem Bewegungsverhalten lernen und sich dynamisch anpassen können. Zusammenfassend lässt sich sagen, dass die kinematische Hand-Skelett-Optimierung mit JAX eine hochmoderne Technologie darstellt, die viele Herausforderungen der Bewegungsrekonstruktion elegant löst und dadurch den Weg für innovative Anwendungen in Robotik, Medizin und menschlicher Computerinteraktion ebnet. Wer sich mit moderner Bewegungsanalyse und robotischer Retargeting beschäftigt, findet in dieser Kombination aus kinematischem Modell, Optimierungsverfahren und der JAX-Infrastruktur ein mächtiges Werkzeug, um präzise, effizient und flexibel menschliche Handbewegungen zu erfassen und nachzubilden.