Drohnenrennen erfreuen sich seit einigen Jahren stetig wachsender Beliebtheit und sind mittlerweile eine anerkannte sportliche Disziplin mit professionellen Wettbewerben und internationalen Meisterschaften. Besonders faszinierend ist das sogenannte FPV-Racing (First-Person View), bei dem die Piloten ihre Fluggeräte so steuern, als säßen sie selbst in der Drohne, indem sie durch eine Kamera an Bord eine Echtzeit-Videoübertragung erhalten. Die Kombination aus höchster Geschwindigkeit und komplexen, dreidimensionalen Rennstrecken macht diesen Sport anspruchsvoll, spektakulär und technologisch herausfordernd. Bis vor kurzem war es jedoch kaum vorstellbar, dass eine autonome Drohne auf dem Niveau menschlicher Weltmeister mithalten könnte. Die Schwierigkeit besteht darin, die Drohne an ihre physikalischen Grenzen zu bringen und gleichzeitig ihre Position und Geschwindigkeit ausschließlich mit Sensoren an Bord zuverlässig einzuschätzen – ganz ohne externe Infrastrukturen wie Motion-Capture-Systeme.
Ein Meilenstein in dieser Hinsicht ist das autonome System Swift, das im Jahr 2023 vorgestellt wurde und die bisher beste Performance im physischen Drohnenrennen ablieferte – teilweise sogar schneller als menschliche Weltmeister. Swift repräsentiert den aktuellen Stand der Forschung, indem es Deep Reinforcement Learning (RL) mit realen Daten kombiniert, um eine Konkurrenzfähigkeit auf höchstem Niveau zu erreichen. Diese Methode beruht darauf, dass ein neuronales Netzwerk seine Flugstrategie durch tausende simulierte Trainingsstunden mithilfe von Belohnungen, welche gutes Rennverhalten fördern, eigenständig verbessert. Dabei berücksichtigt es sowohl die Position der nächsten Rennmarke (meist quadratische Tore) als auch die Wahrung guter Wahrnehmungsbedingungen, um eine präzise Orientierung zu ermöglichen. Ein entscheidender Aspekt des Erfolgs von Swift ist die sogenannte Sim2Real-Transfertechnik, bei der Modelle zunächst in hochqualitativen Simulationen mit realitätsnahen Flugdynamiken trainiert und anschließend durch eine gezielte Anpassung an die tatsächlichen Bedingungen der physischen Drohne verfeinert werden.
Hierbei spielen Daten, die während echten Flugten gesammelt wurden, eine wesentliche Rolle. Obwohl Simulationen dank detaillierter physikalischer Modelle und Daten weit fortgeschritten sind, herrscht zwischen der virtuellen und der realen Welt noch immer ein sogenannter Reality Gap. Swift überwindet diesen, indem es sogenannte Residualmodelle erstellt, die systematische Abweichungen und Wahrnehmungsfehler empirisch erfassen und so die Simulation realistischer machen. Der Kern der Steuerung liegt in einer zweistufigen Architektur. Die erste Komponente, das Wahrnahmesystem, verarbeitet sehr komplexe visuelle und inertiale Signale zunächst und verdichtet diese Informationen zu einem kompakten Zustand.
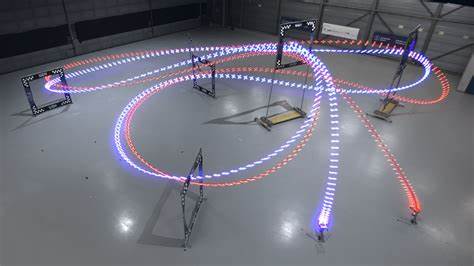
Dazu gehören etwa Kamerabilder kombiniert mit Dreh- und Beschleunigungssensoren. Das zweite Modul, die Steuerungspolitik, nutzt diese Zustandsrepräsentation, um Steuerbefehle in Form von Schub- und Rotationsraten direkt an die Drohne zu senden. Durch die Reinforcement-Learning-Trainingsmethode hat die Politik gelernt, auch bei hoher Fluggeschwindigkeit präzise und zuvor unbekannte Rennstrecken und Manöver zu meistern. Als Prüfstand diente eine 75 Meter lange Strecke mit sieben quadratischen Toren, entworfen von einem professionellen FPV-Piloten. Swift trat bei mehreren Rennen gegen drei der besten menschlichen Piloten der Welt an — darunter zwei Weltmeister aus internationalen Ligen.
In zahlreichen Wettkämpfen erzielte Swift mehrere Siege, mit prägnanten Siegen und schnelleren Rundenzeiten als die menschlichen Kontrahenten. Besonders beeindruckend dabei ist, dass sowohl das autonome System als auch die menschlichen Piloten vergleichbare Drohnen wogen und bauten, was für Chancengleichheit bei der Hardware sorgt. Die Ergebnisse belegen eine höhere Konsistenz und geringere Varianz der Flugzeiten bei Swift im Vergleich zu menschlichen Piloten, die ihre Geschwindigkeit je nach Wettbewerbssituation flexibel anpassen. Interessanterweise zeigt die detaillierte Analyse einzelner Rennabschnitte, dass Swift Menschliche Piloten besonders in komplexen Kurven und bei schnellen Starts outperformt, während Menschen in gewissen Streckenabschnitten früher den nächsten Gate ins Blickfeld bringen. Das autonome System setzt zudem stärker auf sensorische Informationen aus dem Inertialsystem und der visuellen Odometrie, was zu engeren Kurven und höheren Durchschnittsgeschwindigkeiten führt.
Ein großer Vorteil von Swift ist seine extrem niedrige Reaktionszeit von lediglich etwa 40 Millisekunden, während menschliche Piloten durchschnittlich eine Latenz von rund 220 Millisekunden aufweisen. Zudem nutzt die Drohne das Inertialsystem intensiv, ähnlich dem Vestibularapparat des Menschen – ein Sinn, den menschliche Piloten nicht direkt haben, da sie vor Ort nicht im Fluggerät sitzen. Die Kamera allerdings hat bei Swift eine geringere Bildfrequenz (30 Hz) im Vergleich zu menschlichen Headsets, die bis zu 120 Hz erreichen, was den menschlichen Piloten wiederum einen gewissen Vorsprung bei der Bildverarbeitung verschafft. Trotz der starken Leistung von Swift gibt es auch Einschränkungen. So wurde das System noch nicht explizit darauf trainiert, Crash-Situationen zu bewältigen oder unter veränderten Umgebungsbedingungen wie unterschiedlichen Beleuchtungen robust zu agieren.
Menschliche Piloten zeigen hier mehr Anpassungsfähigkeit und Durchhaltevermögen. Technologisch besticht Swift durch seine Kombination von lernbasierten Ansätzen und bewährten Methoden. Beispielsweise erfolgt die Gate-Erkennung durch ein neuronales Netzwerk, das mittels eines U-Net-Architekturbausteins die Tor-Kanten aus Kamerabildern segmentiert. Gleichzeitig verbessert eine Kalman-Filter-Technik die Positionsinformationen durch die Fusion von visuellen und inertialen Daten, um die Drohnenlage präzise zu bestimmen. Letztlich basiert der Trainingsvorgang in der Simulation auf der Proximal Policy Optimization (PPO), einem bewährten Reinforcement-Learning-Algorithmus, der durch kontinuierliche Verbesserung der Flugstrategie eine hohe Robustheit gegenüber den dynamischen und wahrnehmungsbedingten Herausforderungen entwickelt.
Das angewandte Quadrotor-Simulationsmodell ist ebenso eine technische Meisterleistung. Es umfasst genaue physikalische Kräfte und Drehmomente, modelliert die Motor- und Propellerverhalten sowie aerodynamische Einflüsse in einer Weise, die sowohl realitätsnah als auch recheneffizient ist, um eine hohe Anzahl an Trainingsdurchläufen zu ermöglichen. Betaflight, die in der professionellen FPV-Community etablierte Open-Source-Flugsteuerungssoftware, wurde mit ihren spezifischen Reglercharakteristika in der Simulation berücksichtigt, um optimale Übertragbarkeit zu gewährleisten. Die Bedeutung des Erfolgs von Swift geht weit über den Sportsgeist hinaus. Es stellt einen Durchbruch für mobile Robotik und künstliche Intelligenz dar und zeigt eindrucksvoll, wie autonome Systeme reale, hochdynamische Aufgaben auf Weltmeisterschaftsniveau meistern können.
Die entwickelten Methoden könnten auch in anderen physikalischen Anwendungsbereichen wie autonomem Fahren, Robotik in der Logistik und Flugsteuerung von unbemannten Flugzeugen Anwendung finden. Die Publicity rund um Swift hat zudem für Diskussionen gesorgt, wie sich Maschine und Mensch im Wettkampf weiterentwickeln. Mehrere siegreiche Rennen zeigen Potenzial für den Einsatz von autonomen Drohnen als Trainingspartner oder sogar als standardsetzende Konkurrenz in zukünftigen Veranstaltungen. Gleichzeitig betonen menschliche Champions die Faszination und besondere Herausforderung, gegen eine Maschine anzutreten, die keine Ermüdung kennt und konsistent auf höchstem Level performt. Zukünftige Forschungsrichtungen sind vielfältig und fokussieren vor allem darauf, die Flexibilität und Robustheit der Systeme zu erhöhen, zum Beispiel durch diverse Wetter- und Lichtbedingungen, wechselnde Strecken und Fehlererkennung im Flug.
Die Integration erweiterter Sensordaten und schnelleren Kameras könnte die drohneninterne Wahrnehmung noch präzisieren und Latenzen weiter reduzieren. Zusammenfassend lässt sich sagen, dass Swift einen neuen Standard im autonomen Drohnenrennen setzt. Das System vereint fortschrittliche KI-Methoden mit modernster Robotik, um Rennen auf einem Niveau zu absolvieren, das lange für exklusiv menschliche Domäne gehalten wurde. Mit kontinuierlicher Weiterentwicklung verspricht dieser Ansatz eine spannende Zukunft für Hochgeschwindigkeitsautonomie in komplexen, realen Umgebungen, die sowohl sportliche Begeisterung als auch innovative technische Anwendungen fördern wird. Die Kombination aus präziser Wahrnehmung, robusten Steuerungsalgorithmen und datengetriebenem Lernen zeigt, wie künstliche Intelligenz und Robotik zusammenwachsen, um echte physische Herausforderungen unter dynamischen Bedingungen zu meistern.
Champion-Level Drohnenrennen mit Deep Reinforcement Learning ist somit nicht nur ein sportliches Spektakel, sondern auch ein wichtiger Schritt auf dem Weg zu intelligenten autonomen Maschinen der nächsten Generation.