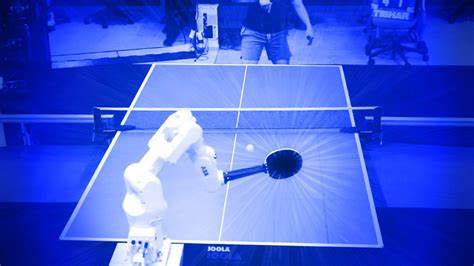
Tischtennis gilt als eine der schnellsten Rückschlagsportarten und stellt selbst für erfahrene Spieler eine Herausforderung dar. Doch mit den Fortschritten in der Robotik und Steuerungstechnik wird es zunehmend möglich, Maschinen zu entwickeln, die auf hohem Niveau Tischtennis spielen können. Eine vielversprechende Entwicklung in diesem Bereich ist der Einsatz von Leichtbauhardware kombiniert mit modellprädiktiver Steuerung, die zusammen einen bedeutenden Fortschritt in der Robotertechnik darstellen und völlig neue Dimensionen der Präzision und Geschwindigkeit eröffnen. Die Grundlage eines jeden Roboterarms, der im Tischtennis eingesetzt wird, ist dessen mechanisches Design. Die neuesten Plattformen zeichnen sich durch eine speziell entwickelte, fünfgradige Freiheitsgrade umfassende Armkonstruktion aus.
Hierbei wird besonderer Wert auf eine leichte Bauweise mit geringem Rotorträgheitsmoment und hohem Drehmoment gelegt. Diese Eigenschaften ermöglichen es dem Roboter, sehr schnell zu beschleunigen, was für das Spielen von Tischtennis essenziell ist – denn die Bewegungen sind kurz und ausgesprochen dynamisch. Ein entscheidender Faktor für erfolgreiche Ballwechsel ist die Fähigkeit, verschiedene Schlagarten mit hoher Präzision auszuführen. Im menschlichen Spiel sind Schlagvarianten wie Loops mit Topspin, Drives mit eher geraden, schnellen Schlägen und Chops mit Unterschnitt sehr wichtig, um je nach Spielsituation unterschiedlich zu reagieren. Bei robotischen Tischtennissystemen muss demnach die Steuerung so ausgelegt sein, dass sie nicht nur den Ball zur richtigen Zeit trifft, sondern auch die Schlagbewegung gezielt variiert, um unterschiedliche Spin- und Schlagtypen erzeugen zu können.
Um diese komplexen Anforderungen zu erfüllen, kommt eine modellprädiktive Steuerung (Model Predictive Control, MPC) zum Einsatz. Diese Art der Regelungstechnik basiert auf der Lösung eines sogenannten Optimalsteuerungsproblems, bei dem der Roboter die bestmögliche Bewegung plant, die alle physischen und spielerischen Vorgaben berücksichtigt. Über eine feste Zeitspanne berechnet das System die optimale Bewegung des Arms, um den Ball nicht nur zu treffen, sondern auch mit der gewünschten Geschwindigkeit, Orientierung und Spin zu schlagen, die für verschiedene Schlagarten notwendig sind. Eine besondere Herausforderung ist die dynamische Natur des Ballfluges im Tischtennis. Schon kleine Abweichungen in Geschwindigkeit oder Winkel können den Ausgang des Ballwechsels entscheidend beeinflussen.
Deshalb ist es wichtig, dass der Roboter in der Lage ist, seine Bewegungsplanung laufend anzupassen. Durch die modellprädiktive Steuerung kann der Roboter auf kurzfristige Änderungen in der Ballbahn reagieren, die beispielsweise durch Fehler in der Ballerkennung oder durch Fremdeinflüsse entstehen. Die Kombination aus leichtem Robotergelenk und dieser adaptiven Regelung erlaubt es, mit hoher Wiederholgenauigkeit und Geschwindigkeit verschiedene Schlagarten auszuführen. Messungen auf der Hardware zeigen beeindruckende Leistungen: Es gelang, den Ball mit einer mittleren Auslassgeschwindigkeit von etwa 11 Metern pro Sekunde zu treffen – und das mit einer Erfolgsquote von 88 Prozent bei unterschiedlichen Schlagtechniken. Diese Ergebnisse sind nicht nur für die Robotikforschung relevant, sondern bieten auch vielversprechende Perspektiven für den Sport und die Ausbildung.
Trainingseinheiten könnten künftig durch robotische Partner ergänzt werden, die auf jede Schlagvariation reagieren und so das Können menschlicher Spieler gezielt verbessern. Ebenso eröffnet die Entwicklung von solchen Robotern Möglichkeiten im Bereich Unterhaltung und sportliches Wettkampfspiel gegen Maschinen. Auf dem Weg zu noch intelligenteren Robotern könnten zukünftig zusätzliche Sensorik, etwa visuelle Erkennungssysteme in Kombination mit Künstlicher Intelligenz (KI), integriert werden, um das Vorhersagesystem der Ballflugbahn weiter zu verbessern. Die Verbindung von Leichtbau-Hardware und fortschrittlicher Steuerung macht schon heute den Einsatz in realistischen Spielsituationen möglich und zeigt eindrucksvoll, wie Robotik die Herausforderungen dynamischer Umgebungen meistern kann. Ein weiterer interessanter Aspekt ist die Energieeffizienz.
Durch die reduzierte Masse und die geringe Trägheit müssen weniger Kräfte aufgebracht werden, was den Energieverbrauch des Roboters senkt und gleichzeitig die Lebensdauer der Komponenten verlängert. Diese nachhaltige Bauweise ist in der industriellen Anwendung wichtig, wo Roboter lange und zuverlässig operieren müssen. Die Wissenschaftler hinter diesen Entwicklungen setzen auf eine multidisziplinäre Herangehensweise. Die Kombination aus mechanischem Design, optimaler Bewegungsplanung und Echtzeitregelung schafft ein System, das von herkömmlichen Roboterarmen weit entfernt ist. Diese Fortschritte zeigen, wie eng interdisziplinäres Know-how aus Maschinenbau, Steuerungstechnik und Robotik geflochten ist und welche Potenziale in der Robotisierung von sportlichen Aktivitäten liegen.
Zukünftige Forschungen könnten sich darauf konzentrieren, den Roboter autonomer zu machen, indem er nicht nur reagiert, sondern das Spielgeschehen strategisch interpretiert und dadurch lernt, taktische Entscheidungen während des Matches zu treffen. So wäre beispielsweise denkbar, dass ein Tischtennisroboter unterschiedliche Spielstile von Gegnern analysiert und sich adaptiv darauf einstellt. Hierfür sind Fortschritte in der Datenverarbeitung und Maschinenlernverfahren essenziell. Zusammenfassend lässt sich sagen, dass die Kombination aus leichter, hochdynamischer Hardware und modellprädiktiver Steuerung wesentliche Vorteile in der Robotertischtennisentwicklung bietet. Mit hoher Geschwindigkeit, präziser Steuerung und einem breiten Repertoire an Schlagtechniken sind diese Roboter in der Lage, die Anforderungen eines anspruchsvollen Ballsports zu erfüllen und könnten so in Zukunft eine wichtige Rolle in Training, Forschung und Unterhaltung spielen.
Die Robotik macht damit nicht nur technische Fortschritte erlebbar, sondern auch eine spannende Symbiose zwischen Mensch und Maschine im Sport.