Die Ingenieurwissenschaft hat in den letzten Jahren vermehrt ihren Blick auf die Natur gerichtet, um effiziente, schlanke und dennoch leistungsfähige Systeme zu entwickeln. Insbesondere bei der Entwicklung von fliegenden Insektenrobotern spielen biomimetische Ansätze eine zentrale Rolle, da natürliche Insekten in puncto Flugfähigkeit und Energieeffizienz seit Millionen von Jahren optimiert sind. Ein vielversprechender Forschungszweig beschäftigt sich mit der Nachbildung des Flügelschlags, angetrieben durch indirekte Muskeln, die im thorakalen Bereich von Fluginsekten wie Fliegen und Bienen vorkommen. Diese indirekten Muskeln erzeugen Flügelschlag nicht durch direkte Muskelanspannung an den Flügeln, sondern durch Deformation des Thorax, was den Robotern neue Perspektiven hinsichtlich Mechanik und Effizienz eröffnet. Die komplexen und spezialisierten Mechanismen, die Insekten für ihre Flugbewegungen nutzen, basieren auf hochentwickelten Strukturen im Thorax, besonders den sogenannten Scharnieren, die eine Vergrößerung und Optimierung der Bewegungsamplitude der Flügel ermöglichen.
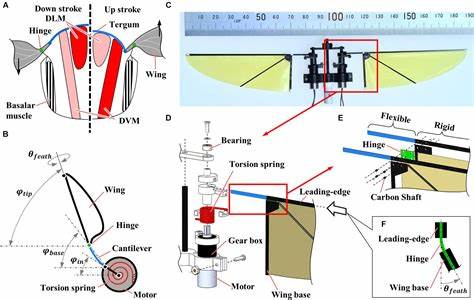
Trotzdem hat die Robotertechnik bislang oft einen direkteren Antrieb verfolgt, der mit hohen Spannungen und komplexen elektronischen Bauteilen arbeitet, etwa piezoelektrische oder dielektrische Elastomeraktoren, die meist ohne die komplexe thorakale Mechanik auskommen. Der biomimetische Ansatz, der sich auf eine Kombination aus Thoraxdeformation, flexiblen Scharnieren und indirekter Muskelkopplung stützt, ist jedoch besonders vielversprechend, um leichte, kompakte und energiesparende Fluginsektenroboter zu entwickeln. Aktuelle Forschungen experimentieren mit verschiedenen Modellen für die Scharniermechanik, die die natürliche Bewegung der Insektenflügel nachbilden. Zwei wesentliche Entwürfe zeigen vielversprechende Ergebnisse: Das Elastische Scharniermodell (Elastic Hinge Model, EHM) und das Achs-Scharniermodell (Axle Hinge Model, AHM). Beide sind inspiriert durch das sogenannte Ennos-Modell, welches die biomechanischen Prinzipien der Flügelschlagentstehung aufgrund thorakaler Deformation beschreibt.
Während das EHM auf eine flexible, monolithische Struktur aus Kunststoff setzt, die sich bei Muskelkontraktion elastisch verformt, simuliert das AHM eine gezielte Rotation der Flügel mittels Metallstiften als Achsen, die die Gelenkbewegung der Insekten unerlässlich kontrollieren. Die Herstellung erfolgt meist durch 3D-Druck mit Polymilchsäure (PLA), was die Fertigung leichter, flexibler und kostengünstiger Prototypen ermöglicht. Schlüsselkomponente für den Antrieb der Flügel sind dabei Formgedächtnislegierungen (Shape-Memory Alloys, SMA), die unter Stromzufuhr kurzzeitig kontrahieren und so eine Muskelaktion imitieren. SMA-Drahtaktuatoren besitzen eine hohe Leistungsdichte bei geringem Gewicht und sind daher optimal für kleine Robotersysteme, bei denen Platz- und Gewichtsrestriktionen vorherrschen. In Experimenten zeigen beide Modelle prinzipiell erfolgreiche Flügelschläge, die durch thorakale Verformungen initiiert werden und dabei Flügelhebungen und Drehungen (Supination) erzeugen.
Allerdings manifestieren sich zwischen den Modellen unterschiedliche Leistungsmerkmale. Das Achs-Scharniermodell erzielt klar definierte, größere Flügelausschläge und steigert somit die Flugdynamik und Bewegungspräzision. Dies liegt an der Optimierung der Kraftübertragung durch feste, rotierende Gelenke, die die Energieverluste reduzieren. Hingegen punktet das Elastische Scharniermodell durch Einfachheit und verteilte Flexibilität, welche als passive Energiespeicherung wirken kann, jedoch bei höheren Frequenzen durch Dämpfungsverluste limitiert wird. Ein entscheidender Engpass beider Systeme ist die Kühlzeit der SMA-Drähte: Da diese durch den Wärmezustand funktionieren, benötigen sie Zeiteinheiten zum Abkühlen, bevor sie zurück in den Martensit-Zustand gelangen und sich wieder ausdehnen können.
Dadurch sinkt mit zunehmender Antriebsfrequenz die Effektivität, was die erreichbare Schlagfrequenz begrenzt. Die Folge sind abnehmende Schwingungsamplituden bei hohen Frequenzen, was wiederum die Flugperformance einschränkt. Anatomisch betrachtet verformt sich besonders die laterale Skutum-Region des thorakalen Gerüsts bei jedem Flügelschlag nach innen, welche als zentraler Mechanismus für die Bewegung in realen Insekten gilt. Die umgesetzten Modelle können diese Art thorakaler Deformationen nachbilden und damit wichtige, zum Fliegen notwendige biomechanische Abläufe simulieren. Dieses Ergebnis bestätigt den Erfolg der biomimetischen Nachbildung und gibt Hinweise darauf, dass die Kombination aus flexiblen Materialien und gezielt definierten Scharnieren einen guten Zugang zum natürlichen Vorbild bietet.
Für die Entwicklung der nächsten Robotergeneration sind einige Erweiterungen geplant: Insbesondere die Ergänzung eines zweiten Muskel-ähnlichen Antriebssystems, welches die sogenannte dorso-longitudinale Muskelschicht simuliert, könnte den vollständigen Flügelschlagzyklus – das Anheben und Absenken der Flügel – nachbilden. Aktuell konzentrieren sich die Modelle auf die Bewegung der dorso-ventralen Muskulatur, die nur den Anhebungsschlag erzeugt. Das Hinzufügen der Längsmuskulatur würde zu einem realistischeren, präziseren und vollständigen Flügelschlag führen. Darüber hinaus fehlen bislang die „Steuermuskeln“ der Insekten, welche feine Anpassungen bei Flugmanövern ermöglichen, einschließlich asymmetrischer Flügelschläge zur Richtungsänderung oder Stabilisierung. Die Implementierung eines solchen Steuerungssystems bei Fluginsektenrobotern ist besonders ambitioniert, kann aber die Flugfähigkeit erheblich verbessern und die Agilität steigern.
Biomimetische Fluginsektenroboter, die durch indirekte Muskeln angetriebene Flügelschlagmechanismen verwenden, bieten sowohl ein faszinierendes Fenster in die Natur als auch ein großes technisches Potenzial. Ihre Anwendungen reichen von der Überwachung schwer zugänglicher Umgebungen bis hin zur Erforschung neuer Fertigungsprinzipien. Die Fähigkeit, durch strukturmechanische Besonderheiten und Materialeigenschaften Bewegungen zu erzeugen, schafft neue Möglichkeiten für leichte, autonome Flugroboter, die nicht auf schwere, energieintensive Antriebssysteme angewiesen sind. Somit knüpft die Forschung an der Nachbildung natürlicher indirekter Flugmechanismen an das Ziel an, flugfähige Mikroroboter effizienter, wendiger und langlebiger zu machen und dabei gleichzeitig die Komplexität und das Gewicht der Mechanik auf ein Minimum zu reduzieren. Die Kombination aus Flexibilität, Gelenkartikulation und Formgedächtnislegierungen scheint dabei der vielversprechendste Weg zu sein, um die flugbiomechanischen Prinzipien der Insekten in technische Systeme zu übertragen.
Abschließend lässt sich sagen, dass die biomimetische Flügelschlagtechnologie für Insektenroboter ein dynamisches und innovationsfreudiges Forschungsfeld ist, das weiterhin vom interdisziplinären Austausch zwischen Biologie, Materialwissenschaft, Maschinenbau und Robotik profitieren wird. Ihre Fortschritte könnten zukünftig nicht nur das Verständnis der Biomechanik von Insekten vertiefen, sondern auch neue Maßstäbe für autonome Mikroroboter setzen – sowohl in technischer Hinsicht als auch hinsichtlich der Energieeffizienz und Bewegungsvielfalt.